Korte samenvatting: Beeldherkenning voor auto's maakt gebruik van convolutionele neurale netwerken (CNN's) om automatisch het merk, model, type en andere kenmerken van een voertuig te identificeren aan de hand van foto's. Deze systemen behalen nauwkeurigheidspercentages van 83-971% en worden gebruikt in uiteenlopende toepassingen, van autonoom rijden tot parkeerbeheer. De technologie is gebaseerd op deep learning-modellen die getraind zijn op grote datasets met gelabelde voertuigafbeeldingen.
Beeldherkenning voor auto's is een essentiële technologie geworden in de hele auto-industrie. Van geautomatiseerde tolheffingssystemen tot apps voor de taxatie van klassieke auto's: AI-gestuurde voertuigidentificatie lost dagelijks concrete problemen op.
Maar hoe herkent een computer nu eigenlijk een sedan van een SUV? Het antwoord ligt in convolutionele neurale netwerken die getraind zijn op duizenden afbeeldingen van voertuigen.
Hoe werken autoherkenningssystemen?
Voertuigherkenningssystemen verwerken beelden via meerdere lagen neurale netwerken. Elke laag identificeert verschillende kenmerken: randen in de eerste lagen, vervolgens vormen en uiteindelijk complete voertuigkenmerken zoals grillepatronen of carrosserievormen.
Volgens onderzoek van IEEE naar voertuigdetectie zijn convolutionele neurale netwerken de standaardmethode geworden voor het herkennen van automodellen. Deze deep learning-modellen analyseren zowel het algehele uiterlijk als specifieke voertuigonderdelen om nauwkeurige identificaties te maken.
De technologie legt beelden vast over een breed spectraalbereik. Onderzoek van het Computational Imaging Lab van Princeton toont aan dat RCCB-stereo-arrays beelden vastleggen van 380 tot 1050 nm, met een basisafstand van 0,76 m. Deze configuratie levert verbeterde nachtelijke prestaties op in vergelijking met conventionele RGB-camera's.

Ontwikkel computervisiesoftware met superieure AI.
AI Superieur Ze ontwikkelen AI-gebaseerde applicaties en maatwerksoftware met behulp van machine learning en AI-modellen. Hun team ondersteunt projecten van de verkenningsfase en data-analyse tot de ontwikkeling van een MVP, integratie en resultaatsevaluatie.
In de automobielindustrie kan dit helpen bij voertuigdetectie, schadecontrole, onderdeelherkenning, camera-inspectie of andere beeldgebaseerde workflows.
Heeft u computervisie nodig voor voertuiggegevens?
AI Superior kan u helpen met:
- het bouwen van beeldherkenningssystemen
- Het detecteren en classificeren van objecten in afbeeldingen.
- Het creëren van aangepaste AI-modellen voor visuele analyse.
- AI-tools koppelen aan bestaande workflows
👉 Neem contact op met AI Superior om uw project te bespreken.
Nauwkeurigheids- en prestatiestatistieken
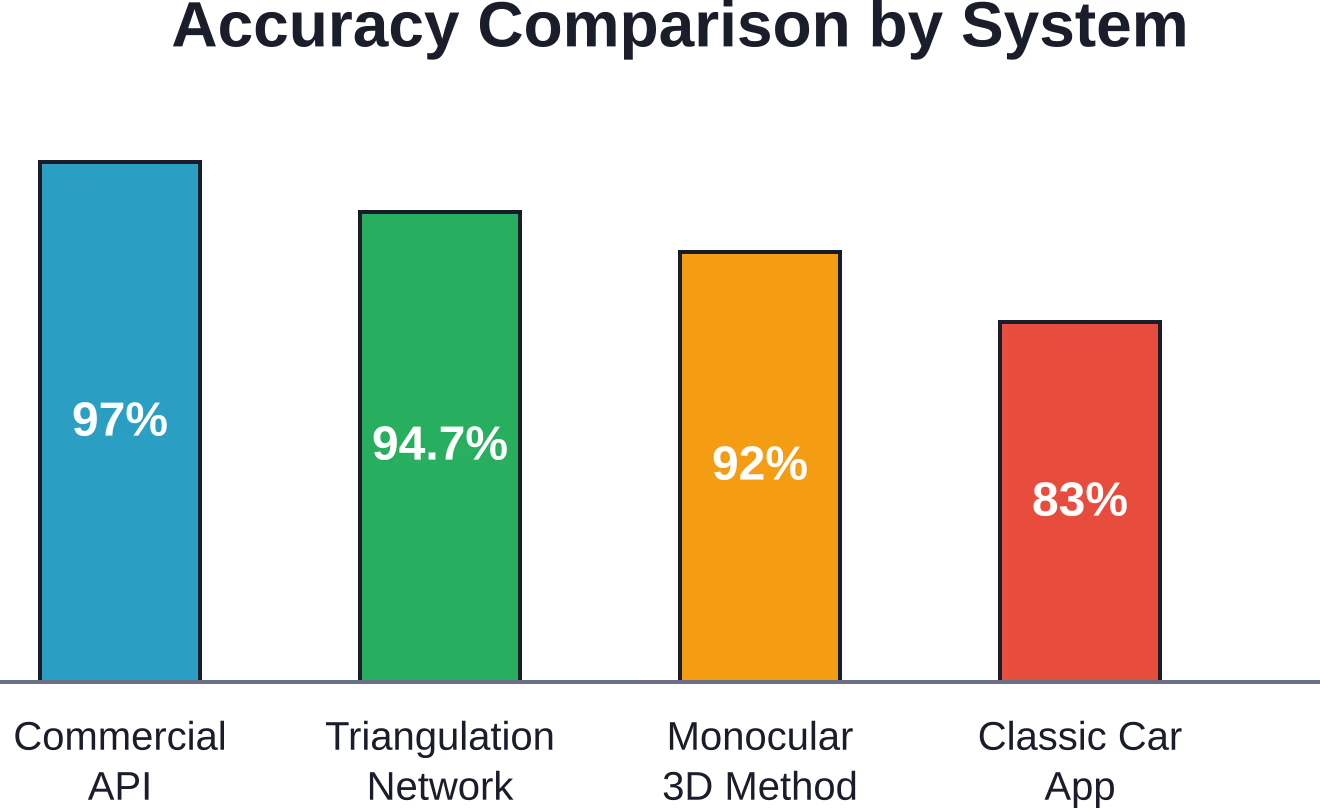
Moderne API's voor voertuigherkenning bereiken indrukwekkende nauwkeurigheid. Vanaf 2026 behalen toonaangevende voertuigherkenningssystemen, geïntegreerd met generatieve AI en LLM-validatielagen, nauwkeurigheidspercentages tussen 981 TP3T en 99,91 TP3T.
Onderzoek naar methoden voor 3D-objectdetectie heeft aangetoond dat het Triangulation Learning Network de beste prestaties leverde met de hoogste gemiddelde precisie en oriëntatiescore in vergelijking met andere benaderingen. De Monocular 3D Object Detection-methode liet een verbetering van ongeveer 6% zien in zowel de gemiddelde precisie als de gemiddelde nauwkeurigheid ten opzichte van de basismethoden.
De kwaliteit van de trainingsdata is van groot belang. Data-augmentatietechnieken verbeteren de modelprestaties in diverse trainingsscenario's.
| Detectiemethode | Gemiddelde precisie | Oriëntatiescore |
|---|---|---|
| Triangulatie-leernetwerk | 0.9467 | 0.9965 |
| Monoculaire 3D-detectie | 0.9204 | 0.9958 |
| Diep leren en geometrie | 0.8678 | 0.9821 |
Toepassingen in de praktijk
Voertuigherkenning vormt de basis voor uiteenlopende toepassingen in diverse sectoren. Geautomatiseerde parkeersystemen gebruiken classificatie om voertuigtypen – minibusjes, SUV's en sedans – te identificeren voor de toewijzing van parkeerplaatsen.
Tolheffingssystemen profiteren van realtime voertuigidentificatie voor een nauwkeurige facturering. Netwerken voor verkeersmonitoring volgen verkeerspatronen per voertuigcategorie.
De Classic Valuer-app demonstreert toepassingen voor consumenten, waarbij klassieke auto's met een nauwkeurigheid van 83% aan de hand van foto's worden geïdentificeerd en taxatiegegevens worden verstrekt. Het systeem werkt als een realtime data-aggregator die dagelijks gegevens van meer dan 600.000 voertuigen en meer dan 50 veilinghuizen verwerkt, waardoor dynamische taxaties worden geleverd in plaats van alleen statische beeldvergelijking.
Integratie van autonome voertuigen
Zelfrijdende systemen zijn sterk afhankelijk van voertuigdetectie en -classificatie. De rijgegevenssets van Princeton richten zich specifiek op ongunstige weersomstandigheden – sneeuw, hevige regen, mist – die nog steeds cruciale uitdagingen vormen voor autonome waarneming.
Moderne sensorarrays combineren beeldvorming in het zichtbare spectrum met nabij-infraroodopnamen. De Onsemi AR0820AT-beeldsensor is geoptimaliseerd voor prestaties bij weinig licht en onderzoek van het Princeton Computational Imaging Lab wijst op een dynamisch bereik van 140 dB HDR op de sensor zelf in gerelateerde sensortoepassingen, waardoor robuuste detectie onder diverse lichtomstandigheden mogelijk is.
Trainingsgegevensvereisten
Effectieve modellen voor autoherkenning vereisen omvangrijke trainingsdatasets. Gegevens moeten worden verzameld vanuit meerdere gezichtspunten, onder verschillende lichtomstandigheden en in realistische scenario's om robuuste classificatiesystemen te trainen.
De dataset voor automodelherkenning bevat 1.717 originele afbeeldingen en 11.265 afbeeldingen die zijn aangevuld met behulp van data-augmentatietechnieken. De afbeeldingen tonen meerdere gezichtspunten, lichtomstandigheden en realistische scenario's uit diverse omgevingen.
De diversiteit van de dataset heeft een directe invloed op de prestaties van het model. Verzamelingen moeten verschillende posities, hoeken en omgevingsomstandigheden van auto's vertegenwoordigen om robuuste classificatiesystemen te kunnen trainen.
Overwegingen bij de implementatie
Organisaties die voertuigherkenning implementeren, staan voor diverse technische keuzes. Cloudgebaseerde API's bieden de mogelijkheid tot directe implementatie, maar brengen doorlopende abonnementskosten met zich mee. Het trainen van een aangepast model biedt meer controle, maar vereist computerkracht en expertise op het gebied van machine learning.
Microsoft Azure AI-services ondersteunen het trainen van modellen voor voertuigherkenning via beheerde infrastructuur. Azure AI Custom Vision stelt teams in staat om modellen te trainen op eigen datasets zonder dat ze daarvoor speciale computerinstanties hoeven te reserveren.
De eisen aan de beeldkwaliteit variëren per toepassing. Systemen hebben een voldoende hoge resolutie nodig om onderscheidende kenmerken vast te leggen, zoals grillepatronen, koplampvormen en carrosseriecontouren. De minimaal aanbevolen resolutie is afhankelijk van de afstand tot het voertuig en de vereiste detailnauwkeurigheid van de identificatie.
Toekomstige ontwikkelingen
Lopend onderzoek richt zich op de resterende uitdagingen. De robuustheid ten aanzien van weersomstandigheden blijft verbeteren dankzij gespecialiseerde trainingsdatasets die ongunstige omstandigheden vastleggen. Multimodale sensorfusie combineert zichtbaar licht met infrarood- en radargegevens voor een verbeterde betrouwbaarheid.
De nauwkeurigheid van fijnmazige herkenning blijft verbeteren. De huidige systemen onderscheiden grote categorieën betrouwbaar; modellen van de volgende generatie streven naar modelidentificatie per jaar en detectie van aanpassingen achteraf.
Edge computing maakt realtime verwerking mogelijk zonder cloudverbinding. Geoptimaliseerde neurale netwerken draaien direct op hardware in voertuigen of ingebouwde camera's voor een lagere latentie en verbeterde privacy.
Veelgestelde vragen
Hoe nauwkeurig is beeldherkenningstechnologie voor auto's?
Commerciële systemen voor autoherkenning behalen een nauwkeurigheid van 98-99,91% voor merk- en modelidentificatie. Onderzoekssystemen zoals het Triangulation Learning Network laten in gecontroleerde evaluaties een gemiddelde precisie van 94,67% zien. De nauwkeurigheid is afhankelijk van de beeldkwaliteit, de lichtomstandigheden en de grootte van de specifieke voertuigdatabase.
Welke technologie maakt voertuigbeeldherkenning mogelijk?
Convolutionele neurale netwerken vormen de kerntechnologie voor autoherkenning. Deze deep learning-modellen verwerken afbeeldingen via meerdere lagen om kenmerken te extraheren en voertuigen te classificeren. Training vereist grote datasets met gelabelde voertuigafbeeldingen – doorgaans duizenden voorbeelden per modelcategorie.
Kan beeldherkenning de kleur en het type van een voertuig identificeren?
Moderne systemen identificeren meerdere voertuigkenmerken, waaronder kleur, type (sedan, SUV, minivan), merk, model en soms het bouwjaar. Geavanceerde systemen detecteren de oriëntatie en 3D-positionering, waarbij de oriëntatiescore in onderzoeksomgevingen hoger kan uitvallen dan 0,99.
Wat zijn veelvoorkomende toepassingen van autoherkenning?
Voertuigherkenning vormt de basis van geautomatiseerde parkeersystemen, tolheffing, verkeersmonitoring, apps voor voertuigwaardering, databases voor wetshandhaving en systemen voor het waarnemen van autonoom rijden. Toepassingen variëren van mobiele apps voor consumenten tot transportinfrastructuur voor bedrijven.
Hoeveel trainingsdata is er nodig voor autoherkenning?
Effectieve modellen vereisen honderden tot duizenden afbeeldingen per voertuigcategorie. Gepubliceerde datasets bevatten meer dan 1700 originele afbeeldingen, vaak aangevuld tot meer dan 10.000 trainingsvoorbeelden. Onderzoeksdatasets reserveren doorgaans 301 TP3T aan afbeeldingen voor testen, waarbij per collectie diverse afbeeldingen worden vastgelegd om een robuuste evaluatie te garanderen.
Heeft het weer invloed op de nauwkeurigheid van voertuigherkenning?
Ongunstige weersomstandigheden zoals regen, mist en sneeuw vormen een aanzienlijke uitdaging voor herkenningssystemen. Gespecialiseerde datasets spelen in op deze scenario's door middel van diverse opnameomstandigheden. Moderne sensoren met een uitgebreid spectraalbereik (380-1050 nm) en een hoog dynamisch bereik (140 dB) verbeteren de prestaties bij moeilijke licht- en weersomstandigheden.
Kan ik voorgegetrainde modellen gebruiken voor voertuigherkenning?
Commerciële API's bieden vooraf getrainde modellen die via een abonnement toegankelijk zijn. Cloudplatforms zoals Microsoft Azure bieden aangepaste beeldverwerkingsservices voor het trainen van gespecialiseerde modellen. Er bestaan open-source implementaties, maar voor een productieomgeving is infrastructuur nodig voor het hosten van modellen en het verwerken van inferenties.
Conclusie
Beeldherkenning voor auto's is een volwaardige technologie die praktische uitdagingen in de automobiel- en transportsector oplost. Met nauwkeurigheidspercentages die de 97% benaderen en uiteenlopende toepassingsscenario's, blijven voertuigherkenningssystemen zich uitbreiden naar nieuwe gebruiksmogelijkheden.
Of het nu gaat om het implementeren van geautomatiseerd parkeren, het bouwen van verkeersanalyses of het ontwikkelen van consumentenapps, inzicht in de basisprincipes van CNN-gebaseerde herkenning helpt teams bij het selecteren van de juiste oplossingen. Controleer de actuele API-prijzen en prestatiebenchmarks van het model bij het evalueren van commerciële opties voor uw specifieke toepassing.