Resumen rápido: El aprendizaje automático está transformando el transporte mediante sistemas inteligentes que predicen patrones de tráfico, optimizan rutas logísticas, mejoran la seguridad vehicular y aumentan la eficiencia general. Desde vehículos autónomos hasta la gestión de la congestión en tiempo real, los algoritmos de aprendizaje automático procesan grandes cantidades de datos para lograr un transporte más inteligente, seguro y sostenible en los sistemas de transporte público, transporte de mercancías y movilidad urbana.
Las redes de transporte en todo el mundo se enfrentan a una presión creciente. El aumento de la población urbana, el creciente número de vehículos y las preocupaciones medioambientales exigen soluciones que la ingeniería tradicional por sí sola no puede ofrecer.
Ahí es donde entra en juego el aprendizaje automático.
Los algoritmos de aprendizaje automático procesan enormes conjuntos de datos de transporte (sensores de tráfico, registros GPS, patrones climáticos, historiales de accidentes) para descubrir patrones invisibles para los analistas humanos. Estos patrones se traducen directamente en carreteras más seguras, trayectos más cortos y una entrega de mercancías más eficiente.
Esta tecnología ya no es una mera especulación futurista. Instituciones de investigación y agencias de transporte de todo el mundo están implementando sistemas basados en aprendizaje automático que predicen la congestión del tráfico antes de que se produzca, desvían los vehículos de reparto para evitar retrasos incipientes e identifican zonas propensas a accidentes antes de que estos ocurran.
Esta guía examina cómo funciona realmente el aprendizaje automático dentro de los sistemas de transporte, qué aplicaciones ofrecen resultados medibles y a qué desafíos se enfrentan los ingenieros al implementar estas tecnologías.
Comprender el aprendizaje automático en el contexto del transporte
El aprendizaje automático representa un subconjunto de la inteligencia artificial centrado en el reconocimiento de patrones y la predicción a partir de datos. A diferencia de los modelos de transporte tradicionales, que se basan en reglas y ecuaciones predeterminadas, los algoritmos de aprendizaje automático aprenden las relaciones directamente a partir de los datos observados.
Sin embargo, hay un aspecto importante: el transporte genera datos a una escala sin precedentes. Cada vehículo con GPS, cada cámara de tráfico, cada uso de tarjeta de transporte crea puntos de datos. Una sola red de tráfico urbano puede generar millones de observaciones diarias.
Los métodos estadísticos tradicionales tienen dificultades con este volumen y complejidad. El aprendizaje automático, en cambio, se beneficia enormemente de ello.
Técnicas básicas de aprendizaje automático utilizadas en el transporte
Las aplicaciones de transporte suelen emplear varios enfoques de aprendizaje automático, cada uno adecuado para diferentes tipos de problemas:
- Las redes neuronales profundas destacan en el procesamiento de datos secuenciales, como los patrones de flujo de tráfico. Una investigación del Laboratorio de Tránsito del MIT demuestra cómo estas redes pueden predecir las decisiones individuales de los usuarios al planificar sus viajes y detectar cambios en los patrones de comportamiento de viaje con mayor eficacia que los modelos tradicionales de elección discreta.
- Los métodos de conjunto combinan múltiples algoritmos para mejorar la precisión de las predicciones. Estudios comparativos recientes demuestran que, si bien los mecanismos de atención y los marcos Transformer capturan eficazmente las dependencias a largo plazo en las secuencias de tráfico, los enfoques de aprendizaje de conjunto resultan más valiosos a medida que los horizontes de predicción se extienden más allá de las predicciones inmediatas.
- Las redes neuronales recurrentes manejan especialmente bien los datos de series temporales. Las investigaciones sobre predicción de tráfico indican que las arquitecturas RNN simples pueden superar a los modelos más complejos al utilizar la incrustación temporal para predicciones de tráfico con 30 días de antelación, lo que pone de manifiesto cómo los enfoques más sencillos a veces ofrecen mejores resultados para horizontes temporales más amplios.
- Los autoencoders reducen la dimensionalidad de los datos conservando la información esencial. Estudios sobre la predicción de accidentes de tráfico demuestran que los modelos de autoencoder profundos pueden lograr una precisión prometedora al predecir los niveles de gravedad de los accidentes, incluso al procesar conjuntos de datos con 49 características.
En qué se diferencia el transporte de otros dominios del aprendizaje automático
El sector del transporte presenta desafíos únicos que lo distinguen de otras aplicaciones de aprendizaje automático.
Las dependencias temporales son de suma importancia. Las condiciones del tráfico a las 8:00 a. m. influyen directamente en las condiciones a las 8:15 a. m. El clima de ayer afecta las condiciones de las carreteras hoy. Los algoritmos deben capturar estas relaciones temporales.
Las relaciones espaciales añaden otra dimensión. La congestión en la autopista 101 afecta a las rutas paralelas. Un accidente en el centro de la ciudad repercute en el tráfico a kilómetros de distancia. Los modelos eficaces incorporan la conectividad geográfica.
La criticidad en materia de seguridad eleva el riesgo. Los errores en las recomendaciones de entretenimiento molestan a los usuarios. Los errores en las predicciones de transporte pueden poner vidas en peligro. Esto exige diferentes estándares de validación y umbrales de seguridad.
La calidad de los datos varía considerablemente según la fuente. Los sensores de tráfico profesionales proporcionan mediciones fiables. Los datos GPS obtenidos mediante crowdsourcing presentan lagunas y ruido. Los modelos deben gestionar esta heterogeneidad de forma adecuada.

Cree flujos de trabajo de ML de transporte con IA superior
Los sistemas de transporte suelen implicar grandes volúmenes de datos operativos, información de rutas, datos de sensores y flujos de trabajo logísticos. IA superior Puede ayudar a las organizaciones a aplicar el aprendizaje automático a proyectos de análisis, optimización y monitorización del transporte.
AI Superior puede ayudar a los proyectos de transporte mediante:
- Estructuración de conjuntos de datos logísticos y operativos
- Desarrollo de modelos predictivos y de optimización
- Creación de flujos de trabajo de transporte para la demostración del concepto
- Detección de patrones en datos de tráfico y operativos
- Evaluación del rendimiento del modelo en condiciones reales
- Facilitar la integración en los sistemas de software de transporte.
Contacta con AI Superior para analizar el flujo de trabajo y los requisitos técnicos.
Aplicaciones para la predicción y gestión del tráfico
La predicción del tráfico representa una de las aplicaciones de aprendizaje automático más consolidadas en el sector del transporte. El objetivo es sencillo: predecir cuántos vehículos utilizarán determinados tramos de carretera en intervalos de tiempo futuros.
Pero la ejecución implica una complejidad considerable.
Predicción del flujo de tráfico
La predicción del flujo de tráfico estima la cantidad de vehículos que transitan por tramos de carretera en intervalos futuros fijos, que suelen oscilar entre 10 minutos y varias horas. Estas predicciones permiten una gestión proactiva del tráfico, en lugar de respuestas reactivas a la congestión ya existente.
Los métodos de aprendizaje automático superan significativamente a los métodos estadísticos tradicionales para esta tarea. Las redes neuronales profundas pueden identificar patrones no lineales en los datos de flujo que los modelos de regresión lineal pasan por alto por completo.
La precisión de la predicción depende en gran medida del horizonte de pronóstico. Las predicciones a corto plazo (de 10 a 30 minutos) suelen ser más precisas que las predicciones a largo plazo (de varias horas o días). Las investigaciones demuestran que las estrategias de predicción deben adaptarse a medida que se extienden los horizontes: el modelado de dependencia temporal funciona bien para pronósticos inmediatos, mientras que los patrones de periodicidad cobran mayor importancia para predicciones a largo plazo.
Predicción y prevención de la congestión
Predecir dónde se formarán las congestiones antes de que se produzcan permite a las agencias de transporte implementar medidas preventivas. Los límites de velocidad variables, la regulación del acceso a las rampas de acceso y la guía de rutas pueden desviar el tráfico de los cuellos de botella que se estén formando.
Los modelos de aprendizaje automático para la predicción de la congestión suelen clasificar los tramos de carretera según su nivel de congestión, en lugar de predecir el número exacto de vehículos. Este enfoque de clasificación suele ser más práctico para los gestores de tráfico que necesitan tomar decisiones binarias sobre las intervenciones.
Las implementaciones en el mundo real combinan modelos de predicción con sistemas de respuesta automatizados. Cuando los modelos pronostican una alta probabilidad de congestión, los sistemas ajustan automáticamente los semáforos, actualizan las señales digitales de las autopistas o envían alertas a las aplicaciones de navegación.
Predicción de velocidad
La predicción precisa de la velocidad permite obtener mejores estimaciones del tiempo de viaje para la planificación de rutas. Las aplicaciones de navegación dependen en gran medida de estas predicciones para recomendar rutas óptimas y proporcionar estimaciones de la hora de llegada.
La predicción de velocidad presenta desafíos que la predicción de flujo no encuentra. La velocidad puede variar drásticamente dentro de un mismo tramo de carretera: la parte delantera de una cola de tráfico avanza lentamente, mientras que los vehículos que se incorporan desde atrás circulan a velocidad de flujo libre. La precisión espacial se vuelve fundamental.
Los métodos de predicción mejorados con mapas que incorporan la geometría de la carretera, las características de las intersecciones y los patrones históricos de velocidad para segmentos específicos demuestran un rendimiento superior en comparación con los modelos que tratan todos los segmentos de carretera como equivalentes.
| Tipo de aplicación | Objetivo de predicción | Horizonte típico | Caso de uso principal |
|---|---|---|---|
| Flujo de tráfico | recuento de vehículos | 10 minutos – 2 horas | Planificación de la gestión del tráfico |
| Congestión | Clasificación del nivel de congestión | 15 minutos – 1 hora | Intervenciones preventivas |
| Velocidad | Velocidad media del segmento | 5 min – 30 min | Optimización de rutas, ETA |
| Tiempo de viaje | Duración desde el origen hasta el destino | Actual – 1 hora | Navegación, planificación de viajes |
Mejora de la seguridad mediante el aprendizaje automático.
Las aplicaciones de seguridad en el transporte utilizan el aprendizaje automático para predecir accidentes, identificar zonas peligrosas y evaluar la gravedad de los choques. Estas aplicaciones salvan vidas directamente cuando se implementan de forma eficaz.
Predicción y prevención de accidentes
Los modelos de predicción de accidentes analizan datos históricos de siniestros, características de las carreteras, condiciones meteorológicas y patrones de tráfico para identificar escenarios de alto riesgo. El objetivo no es predecir accidentes individuales —eso sigue siendo poco práctico— sino identificar las condiciones y los lugares donde la probabilidad de un accidente aumenta significativamente.
Las investigaciones sobre la predicción de la gravedad de los accidentes de tráfico revelan patrones interesantes en la distribución de los datos de los choques. En un conjunto de datos exhaustivo con 49 características, los niveles de gravedad mostraron una distribución muy desequilibrada: 0,3% de nivel de gravedad uno, 71,0% de nivel de gravedad dos, 27,2% de nivel de gravedad tres y 1,4% de incidentes de nivel de gravedad cuatro.
Este desequilibrio plantea desafíos para el modelado. Los algoritmos estándar tienden a sobreestimar los niveles de gravedad comunes, pasando por alto los accidentes graves, aunque poco frecuentes pero críticos. Técnicas como el sobremuestreo sintético de la clase minoritaria y las funciones de pérdida ponderadas ayudan a corregir este desequilibrio.
Los enfoques de autoencoder profundo han demostrado una precisión prometedora para las tareas de predicción de la gravedad al abordar datos desequilibrados sobre la gravedad de los accidentes.
Identificación de lugares peligrosos
En lugar de esperar a que se produzcan varios accidentes para designar una ubicación como peligrosa, los modelos de aprendizaje automático pueden identificar de forma proactiva los tramos de carretera de riesgo basándose en características geométricas, limitaciones de visibilidad, patrones de volumen de tráfico e incidentes históricos de riesgo.
Estos modelos predictivos de puntos críticos permiten a las agencias priorizar las mejoras de seguridad donde tendrán el mayor impacto. El rediseño de intersecciones, la mejora de la visibilidad y la señalización adicional pueden prevenir accidentes en lugar de simplemente reaccionar después de que ocurran.
Evaluación de riesgos en tiempo real
Los sistemas avanzados evalúan el riesgo de colisión en tiempo real según las condiciones actuales. Cuando la lluvia intensa reduce la visibilidad y el volumen de tráfico es elevado en una curva con historial de accidentes, los índices de riesgo aumentan. Las autoridades pueden responder reduciendo los límites de velocidad, mejorando la señalización o incrementando la presencia policial.
Los debates comunitarios sobre la seguridad en el transporte a menudo destacan el valor de estos enfoques proactivos en comparación con los programas de seguridad reactivos tradicionales, que solo intervienen en los lugares después de que surgen patrones de accidentes.
Vehículos autónomos y asistencia avanzada al conductor
Los vehículos autónomos representan quizás la aplicación más visible del aprendizaje automático en el transporte. Estos sistemas deben percibir su entorno, predecir el comportamiento de otros usuarios de la vía y tomar decisiones de conducción seguras; tareas en las que el aprendizaje automático desempeña un papel fundamental.
Percepción y comprensión del entorno
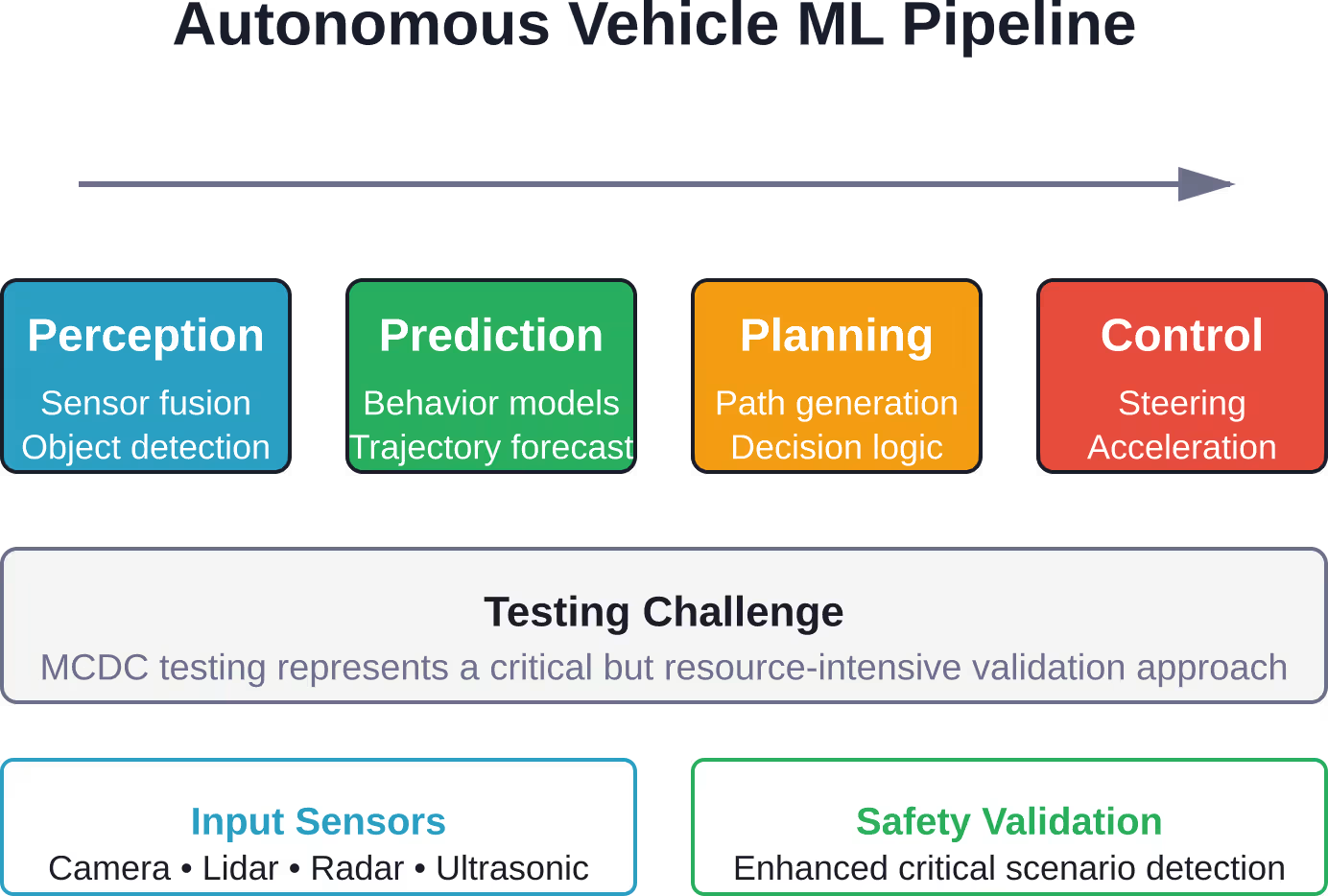
Los vehículos autónomos se basan en el aprendizaje automático para interpretar los datos de sensores provenientes de cámaras, lidar, radar y sensores ultrasónicos. Los modelos de aprendizaje profundo identifican peatones, vehículos, ciclistas, señales de tráfico, marcas viales y obstáculos a partir de los datos brutos de los sensores.
Este desafío de percepción difiere fundamentalmente de las tareas tradicionales de visión artificial. Los vehículos autónomos deben alcanzar una precisión casi perfecta, ya que los fallos de percepción provocan directamente incidentes de seguridad. Un detector de peatones con una precisión de 95% —excelente según muchos estándares de aprendizaje automático— no detectaría a un peatón de cada veinte, lo que representa un riesgo de seguridad inaceptable.
La dificultad de probar software crítico para la vida en sistemas autónomos supera con creces los desafíos de los dominios de software tradicionales. Las pruebas de cobertura de condiciones/decisiones modificadas (MCDC), el método clave para probar software crítico para la vida en la aviación y otros campos, requieren que cada decisión dentro del código tome todos los resultados posibles, que cada condición dentro de cada decisión tome todos los resultados posibles y que cada condición afecte de forma independiente los resultados de las decisiones.
Según investigaciones sobre métodos combinatorios para la confianza y la seguridad en sistemas autónomos, las pruebas MCDC representan un enfoque de validación fundamental, aunque costoso en recursos, para software crítico para la vida. Para vehículos autónomos con millones de líneas de código e innumerables casos límite, las pruebas exhaustivas presentan desafíos extraordinarios.
Los métodos de prueba para sistemas autónomos pueden generar escenarios de prueba críticos sustancialmente más distintos en comparación con los métodos básicos, lo que ayuda a identificar casos límite que las estrategias de prueba más simples no detectan.
Predicción del comportamiento
Los vehículos autónomos deben predecir el comportamiento de los demás usuarios de la vía. ¿Cruzará el peatón el paso de cebra? ¿Se incorporará el vehículo del carril contiguo? Los modelos de aprendizaje automático procesan los patrones de comportamiento observados para generar estas predicciones.
La naturaleza multiagente del tráfico genera complejidad. El comportamiento de cada vehículo influye en los demás, creando interdependencias que los modelos deben capturar. La investigación sobre aprendizaje automático en sistemas multiagente aborda estos desafíos mediante enfoques como el aprendizaje por refuerzo inverso y el modelado basado en la teoría de juegos.
Toma de decisiones y control
Una vez que un vehículo autónomo percibe su entorno y predice el comportamiento de otros usuarios, debe decidir cómo actuar. El aprendizaje automático contribuye a estas decisiones, aunque muchos sistemas combinan modelos aprendidos con restricciones de seguridad basadas en reglas para garantizar un comportamiento predecible en situaciones críticas.
El camino desde la investigación hasta la implementación sigue siendo largo. Los requisitos de prueba, los marcos regulatorios y las cuestiones de responsabilidad continúan evolucionando. Pero las capacidades subyacentes de aprendizaje automático siguen avanzando de manera constante.
Optimización de la logística y el transporte de mercancías
Las operaciones logísticas generan enormes costes e impactos medioambientales. La optimización mediante aprendizaje automático puede reducirlos significativamente gracias a una mejor planificación de rutas, previsión de la demanda y asignación de recursos.
Optimización de ruta
La optimización de rutas tradicional utiliza algoritmos como el de Dijkstra para encontrar la ruta más corta o los solucionadores de problemas de enrutamiento de vehículos. Estos funcionan bien cuando los tiempos de viaje se mantienen constantes, pero el transporte en el mundo real implica condiciones dinámicas.
El aprendizaje automático optimiza las rutas prediciendo los tiempos de viaje en función de la hora. Una ruta óptima a las 6:00 a. m. podría tener un rendimiento deficiente a las 8:00 a. m. debido a la congestión de la hora punta. Los modelos de aprendizaje automático entrenados con datos históricos de GPS pueden predecir estas variaciones y recomendar rutas que minimicen el tiempo total de viaje previsto.
Las investigaciones sobre las operaciones de entrega de última milla demuestran que los enfoques de aprendizaje automático pueden superar significativamente a los métodos tradicionales basados en optimización y a otras arquitecturas de aprendizaje automático para la planificación de rutas de entrega.
Previsión de la demanda
Las empresas de logística deben asignar vehículos y conductores para satisfacer la demanda prevista. La escasez de recursos se traduce en entregas fallidas y clientes insatisfechos. El exceso de recursos genera costes innecesarios.
Los modelos de aprendizaje automático pronostican los patrones de demanda basándose en datos históricos de entregas, tendencias estacionales, pronósticos meteorológicos, eventos locales e indicadores económicos. Estas predicciones permiten tomar mejores decisiones en la asignación de recursos.
La previsión de la demanda resulta especialmente valiosa para los servicios de movilidad compartida, donde la demanda fluctúa drásticamente según el tiempo y la ubicación. Posicionar los vehículos en zonas de alta demanda antes de que lleguen las solicitudes reduce los tiempos de espera y mejora la calidad del servicio.
Gestión de inventarios y flotas
El aprendizaje automático ayuda en la toma de decisiones sobre la gestión del inventario, determinando qué centros de distribución deben almacenar qué productos y en qué cantidades. Los modelos pronostican los patrones de demanda regional y optimizan la ubicación del inventario para minimizar los costos de transporte sin comprometer los niveles de servicio.
Las aplicaciones de gestión de flotas predicen las necesidades de mantenimiento antes de que se produzcan fallos, programan el mantenimiento de los vehículos para minimizar las interrupciones operativas y optimizan la composición de la flota en función de los patrones de demanda.
Aplicaciones de transporte público
Los sistemas de transporte público se enfrentan a desafíos únicos en los que el aprendizaje automático aporta un valor sustancial. A diferencia de los vehículos privados, el transporte público opera con horarios fijos que deben adaptarse a la demanda variable manteniendo la eficiencia.
Predicción de número de pasajeros
La previsión precisa del número de pasajeros permite a las agencias de transporte ajustar los niveles de servicio adecuadamente. Poner en circulación autobuses adicionales durante los periodos de mayor demanda previstos mejora la experiencia de los pasajeros, mientras que evitar servicios innecesarios durante los periodos de baja demanda permite controlar los costes.
Los modelos de aprendizaje automático para la predicción del número de usuarios del transporte público incorporan factores como el día de la semana, la hora del día, las condiciones meteorológicas, los eventos locales, los calendarios escolares y los patrones históricos de uso. Los enfoques de aprendizaje profundo pueden capturar los complejos efectos de interacción entre estas variables que los modelos más simples no logran captar.
Estimación del tiempo de viaje
Los tiempos de viaje en autobús varían considerablemente según las condiciones del tráfico, el volumen de pasajeros y la sincronización de los semáforos. Proporcionar a los pasajeros predicciones de llegada precisas mejora sustancialmente la experiencia del usuario en comparación con la información estática del horario.
La predicción del tiempo de viaje en rutas mediante mapas y redes neuronales profundas ha demostrado un excelente rendimiento en esta aplicación. Estos modelos incorporan la topología de la red vial, los patrones históricos de velocidad y las condiciones actuales para generar predicciones precisas incluso para rutas y tiempos con datos históricos limitados.
Generación de patrones de actividad
La modelización de la demanda de transporte se basa en la comprensión de los patrones de actividad humana: cuándo viajan las personas, adónde van y qué modos de transporte eligen. Los modelos tradicionales basados en la actividad utilizan enfoques basados en reglas para generar poblaciones sintéticas con patrones de actividad realistas.
Los enfoques innovadores que incorporan el aprendizaje profundo para los modelos de demanda de transporte se muestran prometedores para generar patrones de actividad más realistas. Estos modelos pueden aprender patrones complejos a partir de datos de encuestas de viajes observadas y generar poblaciones sintéticas que se ajustan mejor a la diversidad de comportamientos del mundo real.
Integración del transporte multimodal
El transporte moderno abarca múltiples modalidades: caminar, andar en bicicleta, autobuses, trenes, viajes compartidos y vehículos privados. Para optimizar el uso de estas modalidades, es necesario comprender cómo las personas eligen entre las diferentes opciones y cómo coordinar los sistemas.
Predicción de la elección del modo de transporte
Comprender qué medio de transporte elegirán las personas para viajes específicos ayuda a las agencias a planificar inversiones en infraestructura y niveles de servicio. Los modelos de aprendizaje automático pueden predecir la elección del medio de transporte en función de las características del viaje, las opciones disponibles, las preferencias individuales y los factores contextuales.
Los enfoques híbridos de selección de modo de transporte que combinan el aprendizaje automático con métodos de toma de decisiones multicriterio (MCDM) resultan especialmente prometedores. Estos enfoques aprovechan las capacidades de reconocimiento de patrones del aprendizaje automático, al tiempo que incorporan los marcos de decisión estructurados que proporciona el MCDM.
Integración de la movilidad como servicio
Las plataformas de movilidad como servicio (MaaS) integran múltiples modos de transporte en servicios unificados. Los usuarios pueden planificar, reservar y pagar viajes multimodales a través de una única aplicación.
El aprendizaje automático impulsa los sistemas de recomendación de estas plataformas, prediciendo qué combinaciones de modos de transporte se adaptarán mejor a las necesidades de los usuarios según sus preferencias, el contexto y las condiciones en tiempo real. Los algoritmos deben equilibrar múltiples objetivos: minimizar el tiempo de viaje, reducir los costos, mejorar la confiabilidad y reducir el impacto ambiental.
Desafíos y consideraciones para la implementación
A pesar de sus prometedoras capacidades, la implementación del aprendizaje automático en los sistemas de transporte presenta desafíos sustanciales que las organizaciones deben afrontar con cautela.
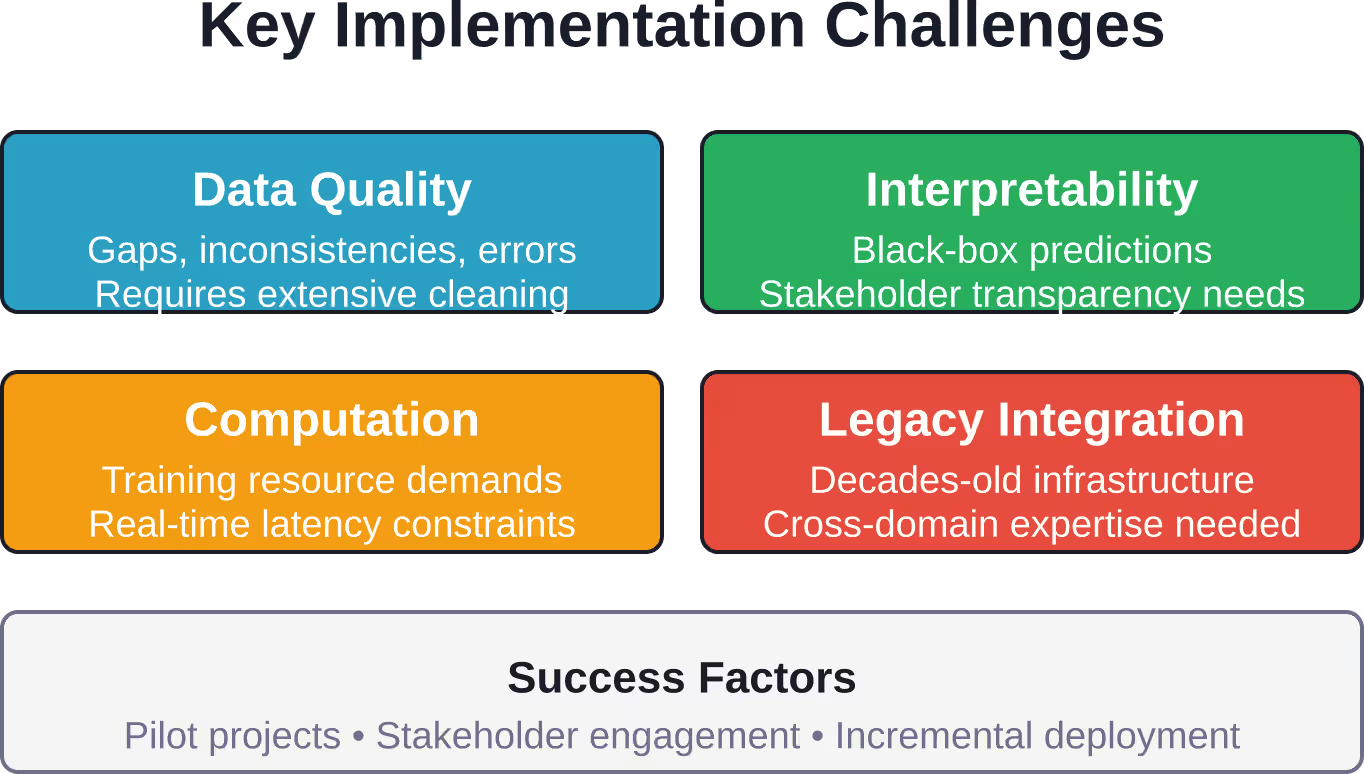
Calidad y disponibilidad de los datos
Los modelos de aprendizaje automático requieren grandes cantidades de datos de entrenamiento de alta calidad. Los datos de transporte suelen presentar lagunas, inconsistencias y errores. Los fallos de los sensores generan valores faltantes. El ruido del GPS produce imprecisiones en la ubicación. La recopilación manual de datos introduce errores humanos.
Las organizaciones deben invertir en procesos de limpieza, validación y control de calidad de datos antes incluso de que pueda comenzar el desarrollo del modelo. Este trabajo preparatorio suele consumir más tiempo y recursos que el propio modelado.
La disponibilidad de datos varía drásticamente según la ubicación. Las grandes áreas urbanas con extensas redes de sensores proporcionan conjuntos de datos muy completos. Las ciudades más pequeñas y las zonas rurales a menudo carecen de la infraestructura necesaria para generar datos comparables, lo que limita la viabilidad de las aplicaciones de aprendizaje automático.
Requisitos de interpretabilidad del modelo
Las decisiones en materia de transporte suelen requerir justificación y transparencia. Una agencia que implementa un cambio en la sincronización de los semáforos basado en predicciones de aprendizaje automático debe explicar el razonamiento a las partes interesadas y al público.
Los modelos de aprendizaje profundo que ofrecen un alto rendimiento predictivo suelen funcionar como cajas negras, lo que dificulta su interpretación. Esto genera una tensión entre la precisión del modelo y los requisitos de explicabilidad.
Los enfoques que mejoran la interpretabilidad —análisis de la importancia de las características, visualización de la atención, explicación del modelo sustituto— ayudan a cerrar esta brecha, pero no resuelven por completo la disyuntiva fundamental entre la complejidad del modelo y la transparencia.
Requisitos computacionales
El entrenamiento de modelos sofisticados de aprendizaje automático exige importantes recursos computacionales. Las grandes redes de tráfico con millones de puntos de datos requieren hardware potente y tiempos de entrenamiento prolongados.
Las aplicaciones en tiempo real se enfrentan a limitaciones computacionales especialmente estrictas. Un modelo de predicción de tráfico que tarda cinco minutos en generar una previsión de diez minutos resulta poco útil. Su implementación requiere una optimización minuciosa para garantizar que los modelos se ejecuten con la suficiente rapidez para su uso operativo.
Integración con sistemas existentes
Las agencias de transporte operan sistemas heredados construidos a lo largo de décadas. Integrar nuevas capacidades de aprendizaje automático con los sistemas de gestión de tráfico, las plataformas de operaciones de transporte público y la infraestructura de datos existentes presenta desafíos técnicos.
Estos proyectos de integración requieren conocimientos especializados que abarquen el aprendizaje automático, la ingeniería de transporte y la integración de sistemas, una combinación que rara vez se encuentra en una sola persona o incluso en una sola organización.
Tendencias emergentes y direcciones futuras
El aprendizaje automático en el sector del transporte sigue evolucionando rápidamente. Varias tendencias emergentes prometen transformar la forma en que se aplican estas tecnologías en los próximos años.
Computación de borde y aprendizaje distribuido
Los enfoques tradicionales de aprendizaje automático procesan datos en servidores en la nube centralizados. La computación perimetral acerca el procesamiento a las fuentes de datos: cámaras de tráfico con procesamiento integrado, vehículos con capacidad de procesamiento local, controladores de intersecciones con modelos de aprendizaje automático incorporados.
Este enfoque distribuido reduce la latencia, mejora la privacidad y permite el funcionamiento durante interrupciones de conectividad. Las técnicas de aprendizaje federado permiten entrenar modelos en dispositivos distribuidos sin centralizar datos confidenciales.
Transferencia de aprendizaje entre ciudades
Entrenar modelos de aprendizaje automático desde cero requiere una gran cantidad de datos locales. El aprendizaje por transferencia permite que los modelos entrenados en una ciudad sirvan como puntos de partida para otras ubicaciones, lo que requiere menos datos locales para lograr un buen rendimiento.
Un modelo de predicción de tráfico entrenado con datos de Nueva York podría transferirse eficazmente a Filadelfia con ajustes locales relativamente sencillos. Esta capacidad podría democratizar el acceso al aprendizaje automático para ciudades más pequeñas que no pueden generar conjuntos de datos de entrenamiento comparables a los de las grandes áreas metropolitanas.
Aprendizaje por refuerzo para el control
La mayoría de las aplicaciones actuales de aprendizaje automático en el transporte se centran en la predicción. El aprendizaje por refuerzo permite que los sistemas aprendan políticas de control óptimas mediante ensayo y error: cómo sincronizar los semáforos, cuándo enviar vehículos de transporte público y cómo fijar el precio de los servicios de viajes compartidos para equilibrar la oferta y la demanda.
Los entornos de simulación permiten que los agentes de aprendizaje por refuerzo se entrenen en millones de escenarios virtuales antes de su implementación en sistemas reales, abordando así las preocupaciones de seguridad que hacen que el aprendizaje basado únicamente en ensayo y error sea poco práctico en las redes de transporte en funcionamiento.
Coordinación multiagente
El transporte implica inherentemente la interacción de múltiples agentes: vehículos, peatones, sistemas de transporte público y flotas logísticas. El aprendizaje por refuerzo multiagente y los enfoques basados en la teoría de juegos pueden optimizar los resultados a nivel de sistema, en lugar de centrarse únicamente en los objetivos de cada agente individual.
Estos enfoques se encuentran aún en gran medida en fase de investigación, pero resultan prometedores para abordar los desafíos de coordinación que la optimización mediante un solo agente no puede resolver eficazmente.
Mejores prácticas para las organizaciones
Las organizaciones que implementan el aprendizaje automático en el transporte deben seguir prácticas que aumenten la probabilidad de éxito al tiempo que gestionan los riesgos.
Comience con problemas bien definidos.
El aprendizaje automático funciona mejor cuando se aplica a problemas específicos y bien definidos, con métricas de éxito claras. "Mejorar el flujo de tráfico" es demasiado vago. "Reducir el tiempo medio de viaje en la Ruta 50 durante la hora punta de la tarde en 10%" proporciona una dirección clara y resultados medibles.
Las organizaciones deben identificar problemas de alto valor donde la disponibilidad de datos, el apoyo de las partes interesadas y la viabilidad técnica coincidan. Estos se convierten en puntos de partida ideales para los proyectos iniciales de aprendizaje automático.
Primero, construya la infraestructura de datos.
Intentar aplicar el aprendizaje automático sin una infraestructura de datos sólida genera frustración. Las organizaciones deben invertir en capacidades de recopilación, almacenamiento, limpieza y gestión de datos antes de comenzar a desarrollar modelos.
Esta infraestructura ofrece beneficios que van más allá de las aplicaciones de aprendizaje automático: mejores datos mejoran el análisis tradicional, la elaboración de informes y la toma de decisiones en todas las organizaciones.
Impulsar proyectos piloto
Las implementaciones de aprendizaje automático a gran escala en todo el sistema conllevan un riesgo considerable. Los proyectos piloto de alcance limitado permiten a las organizaciones aprender, validar capacidades y demostrar su valor antes de asumir compromisos importantes.
Los proyectos piloto exitosos generan confianza en la organización y apoyo de las partes interesadas para una implementación más amplia. Los proyectos piloto fallidos brindan oportunidades de aprendizaje a un costo limitado.
Invierta en talento y formación.
El aprendizaje automático requiere conocimientos especializados de los que a menudo carecen las agencias de transporte tradicionales. Las organizaciones deben contratar científicos de datos con experiencia en el sector del transporte o capacitar a profesionales del transporte en técnicas de aprendizaje automático; idealmente, ambas cosas.
Las alianzas con universidades, empresas de consultoría y compañías tecnológicas pueden complementar las capacidades internas, pero los programas de aprendizaje automático exitosos a largo plazo requieren experiencia interna para mantener y desarrollar los sistemas.
Mantener la supervisión humana
El aprendizaje automático debe complementar la toma de decisiones humanas, no reemplazarla por completo, especialmente en aplicaciones críticas para la seguridad. Los sistemas deben presentar predicciones y recomendaciones de aprendizaje automático a los operadores humanos, quienes conservan la autoridad para tomar la decisión final.
Este enfoque de intervención humana mantiene la rendición de cuentas al tiempo que aprovecha las capacidades de reconocimiento de patrones del aprendizaje automático para mejorar la calidad de las decisiones.
Preguntas frecuentes
¿Qué tan precisas son las predicciones de tráfico basadas en aprendizaje automático?
La precisión varía considerablemente según el horizonte de predicción, la calidad de los datos y la sofisticación del modelo. Las predicciones a corto plazo (de 10 a 30 minutos) pueden alcanzar una precisión de 85 a 951 TP3T en redes urbanas bien instrumentadas. La precisión disminuye para horizontes más largos; las predicciones extendidas de varios días suelen mostrar una precisión menor. Las investigaciones demuestran que los modelos RNN simples pueden superar a arquitecturas más complejas para horizontes extendidos, como las predicciones de 30 días, lo que demuestra que la selección del modelo es crucial. La precisión en el mundo real también depende en gran medida de la calidad de los datos locales y de la fidelidad con la que los datos de entrenamiento representan las condiciones actuales.
¿Qué datos requieren los sistemas de aprendizaje automático para el transporte?
Los requisitos varían según la aplicación, pero las fuentes de datos comunes incluyen mediciones de sensores de tráfico (detectores de bucle, cámaras, radar), registros GPS de vehículos de sondeo, transacciones con tarjetas inteligentes de transporte público, observaciones meteorológicas, topología de la red vial, sincronización de semáforos, informes de accidentes y calendarios de eventos especiales. El entrenamiento de alta calidad generalmente requiere meses o años de datos históricos que abarquen diversas condiciones. Algunas aplicaciones pueden funcionar con semanas de datos al utilizar el aprendizaje por transferencia de modelos entrenados en otros lugares. La limpieza y validación de datos a menudo consumen más esfuerzo que el propio trabajo de modelado.
¿Pueden las ciudades pequeñas implementar sistemas de transporte basados en aprendizaje automático?
Las ciudades pequeñas se enfrentan a desafíos en comparación con las grandes áreas metropolitanas: menor disponibilidad de datos, presupuestos más reducidos y personal técnico limitado. Sin embargo, las plataformas en la nube, las técnicas de aprendizaje por transferencia y las soluciones de proveedores hacen que el aprendizaje automático sea cada vez más accesible para organizaciones de diversos tamaños. Comenzar con aplicaciones específicas que aprovechen los datos disponibles resulta más eficaz que intentar implementaciones de sistemas integrales. Las alianzas con universidades o agencias regionales de transporte pueden proporcionar la experiencia y los recursos que las ciudades pequeñas no pueden mantener por sí solas. La clave reside en definir el alcance adecuado y no intentar replicar lo que solo las grandes ciudades con amplios recursos pueden lograr.
¿Cómo gestionan los vehículos autónomos situaciones que no están incluidas en sus datos de entrenamiento?
Esto representa uno de los problemas más complejos del desarrollo de vehículos autónomos. Entre los enfoques se incluyen simulaciones exhaustivas para generar artificialmente escenarios poco frecuentes, un diseño de sistema cuidadoso que se adapta gradualmente a situaciones desconocidas, una toma de decisiones conservadora que prioriza la seguridad ante la incertidumbre y sistemas de aprendizaje continuo que mejoran con la experiencia de toda la flota. Sin embargo, el desafío fundamental persiste: si bien los métodos de prueba pueden generar muchos más escenarios críticos distintos que los métodos básicos, una cobertura verdaderamente integral de todas las situaciones posibles sigue siendo inviable. Por ello, la supervisión humana y los márgenes de seguridad conservadores siguen siendo esenciales a medida que la tecnología continúa desarrollándose.
¿Cuál es la diferencia entre el aprendizaje automático y los modelos de transporte tradicionales?
Los modelos de transporte tradicionales utilizan relaciones matemáticas predeterminadas derivadas de la teoría del transporte: el flujo de tráfico sigue ecuaciones específicas y los viajeros eligen rutas en función de funciones de utilidad definidas. Estos modelos requieren que los ingenieros de transporte especifiquen explícitamente todas las relaciones. Los modelos de aprendizaje automático, en cambio, aprenden patrones directamente de los datos observados sin necesidad de que los ingenieros especifiquen fórmulas matemáticas exactas. El aprendizaje automático puede capturar relaciones no lineales complejas que los modelos tradicionales no detectan, pero a menudo funciona como una caja negra con una interpretabilidad limitada. En la práctica, los enfoques híbridos que combinan la estructura de los modelos tradicionales con la flexibilidad del aprendizaje automático suelen ofrecer el mejor equilibrio entre precisión, interpretabilidad y fiabilidad.
¿Cuánto cuesta implementar sistemas de transporte basados en aprendizaje automático?
Los costos varían enormemente según el alcance, la infraestructura existente y el enfoque de implementación. Las organizaciones pueden gastar desde decenas de miles de dólares en proyectos piloto específicos que utilizan plataformas en la nube y soluciones de proveedores, hasta millones en sistemas integrales que requieren desarrollo personalizado y un amplio despliegue de sensores. La infraestructura de datos suele representar un componente importante del costo: instalación y mantenimiento de sensores, creación de flujos de datos y establecimiento de sistemas de almacenamiento. Los costos continuos de computación en la nube, mantenimiento de modelos y experiencia del personal se mantienen indefinidamente. Muchas organizaciones comienzan con pequeños proyectos piloto para demostrar su valor antes de comprometerse con inversiones mayores. Las opciones de software como servicio (SaaS) proporcionadas por los proveedores pueden reducir los costos iniciales, pero aumentan los gastos de suscripción recurrentes.
¿Cómo afectan las preocupaciones sobre la privacidad al aprendizaje automático en el sector del transporte?
Los datos de transporte suelen contener información sensible sobre los movimientos y comportamientos individuales. Los registros GPS pueden revelar la ubicación del domicilio y del trabajo, las rutinas diarias y los destinos visitados. Las normativas de privacidad, como el RGPD en Europa y diversas leyes estatales en EE. UU., imponen requisitos para la recopilación, el almacenamiento y el uso de datos. Las mejores prácticas incluyen la anonimización de datos, la agregación para eliminar la identificación individual, el almacenamiento seguro con controles de acceso, políticas claras sobre el uso y la retención de datos, y la transparencia con el público sobre qué datos se recopilan y cómo se utilizan. La computación perimetral y los enfoques de aprendizaje federado, que procesan los datos localmente en lugar de centralizarlos, pueden reducir los riesgos de privacidad al tiempo que permiten las aplicaciones de aprendizaje automático. Las organizaciones deben equilibrar las capacidades de aprendizaje automático con las protecciones legítimas de la privacidad.
Conclusión
El aprendizaje automático ha pasado de la investigación experimental a la realidad operativa en los sistemas de transporte de todo el mundo. Los modelos de predicción de tráfico guían los desplazamientos diarios. Los vehículos autónomos circulan por las calles de la ciudad. Los algoritmos logísticos optimizan las rutas de reparto. Los sistemas de transporte público pronostican la afluencia de pasajeros y estiman los tiempos de llegada.
La tecnología no es perfecta. Los desafíos de implementación relacionados con la calidad de los datos, los requisitos computacionales y la integración con sistemas heredados exigen una gestión cuidadosa. Probar sistemas autónomos críticos para la vida requiere recursos que representan presupuestos de desarrollo significativos. La interpretabilidad del modelo sigue siendo un desafío constante cuando las partes interesadas exigen transparencia.
Pero la tendencia es clara. A medida que la infraestructura de datos se expanda, los algoritmos mejoren y la experiencia organizativa crezca, las aplicaciones de aprendizaje automático en el transporte serán cada vez más sofisticadas y generalizadas.
Las implementaciones más exitosas comienzan con un enfoque claro: identificando problemas específicos donde el aprendizaje automático puede aportar un valor cuantificable, construyendo la infraestructura de datos necesaria, ejecutando proyectos piloto y expandiéndose gradualmente en función de los resultados demostrados.
Las organizaciones que invierten ahora en el desarrollo de capacidades de aprendizaje automático se posicionan para beneficiarse de estas tecnologías a medida que maduren. Aquellas que esperan corren el riesgo de quedarse atrás con respecto a sus competidores y agencias similares que ya utilizan estas herramientas.
La cuestión no es si el aprendizaje automático transformará el transporte —de hecho, ya lo ha hecho—, sino con qué rapidez las organizaciones se adaptarán para aprovechar estas capacidades de forma eficaz.
¿Listo para explorar cómo el aprendizaje automático puede mejorar sus operaciones de transporte? Comience por identificar problemas clave, evaluar la disponibilidad de sus datos y contactar con expertos que puedan ayudarle a traducir las capacidades del aprendizaje automático en mejoras operativas.