ملخص سريع: تُمكّن تقنيات التعلّم الآلي المركبات ذاتية القيادة من إدراك بيئتها، واتخاذ القرارات في الوقت الفعلي، وتحسين السلامة من خلال الشبكات العصبية، ورؤية الحاسوب، ودمج البيانات الحسية. تعالج نماذج التعلّم العميق البيانات من الكاميرات، وتقنية الليدار، والرادار لاكتشاف الأجسام، والتنبؤ بالسلوك، والتنقل في سيناريوهات المرور المعقدة. تضمن معايير الاختبار مثل MCDC وأطر عمل المعهد الوطني للمعايير والتكنولوجيا (NIST) استيفاء هذه الأنظمة لمتطلبات السلامة قبل نشرها.
لم تعد المركبات ذاتية القيادة مجرد خيال علمي. إنها تجوب المدن، وتتعلم من ملايين الأميال المقطوعة على الطرق، وتعيد تشكيل طريقة عمل النقل.
ما هو جوهر هذا التحول؟ التعلم الآلي. الشبكات العصبية التي يمكنها رصد المشاة في أجزاء من الثانية، والخوارزميات التي تتنبأ بما سيفعله السائقون الآخرون لاحقًا، والأنظمة التي تتحسن مع كل رحلة.
بلغت قيمة سوق المركبات ذاتية القيادة العالمية حوالي 1.50 إلى 80 مليار دولار أمريكي في عام 2020 (بحسب نطاق أنظمة المستوى 3+)، وقد نما السوق بوتيرة أسرع بكثير من التوقعات الأولية. وبحلول عام 2025، وصل حجم السوق إلى ما يقارب 1.200 إلى 3.00 مليار دولار أمريكي، ومن المتوقع أن يصل إلى 1.250 إلى أكثر من 4.00 مليار دولار أمريكي في عام 2026، مع توقعات العديد من المحللين باستمرار معدل نمو سنوي مركب قوي برقمين (30-35 مليار دولار أمريكي أو أكثر في السيناريوهات المتفائلة).
إن هذا النمو الهائل لا يقتصر على الأجهزة فحسب، بل إنه مدعوم بالتقدم في مجال الذكاء الاصطناعي الذي يجعل المركبات أكثر ذكاءً وأمانًا وقدرة.
لكن الأمر المهم هو: أن بناء أنظمة التعلم الآلي للقيادة الذاتية ليس كبناء محرك توصيات أو روبوت محادثة. فعندما يخطئ نظام ما، تصبح حياة الناس في خطر.
يُثير هذا الأمر تحديات فريدة. كيف يُدرّب المهندسون الشبكات العصبية على التعامل مع مواقف لم يسبق لهم رؤيتها؟ ما هي معايير الاختبار التي تضمن سلامة هذه الأنظمة على الطرق العامة؟ وكيف تُوازن الجهات التنظيمية بين الابتكار والسلامة العامة؟
كيف تدعم تقنيات التعلم الآلي أنظمة المركبات ذاتية القيادة
لا يقتصر دور التعلم الآلي على مساعدة المركبات ذاتية القيادة فحسب، بل إنه يمكّنها بشكل أساسي. فبدون الشبكات العصبية التي تعالج بيانات المستشعرات في الوقت الفعلي، لن تتمكن السيارات ذاتية القيادة من العمل.
تنقسم بنية التكنولوجيا إلى عدة طبقات مترابطة.
الإدراك من خلال رؤية الحاسوب
تحلل خوارزميات رؤية الحاسوب لقطات الكاميرا لتحديد الأجسام، وقراءة اللافتات، وفهم هندسة الطريق. تستطيع الشبكات العصبية الالتفافية المدربة على ملايين الصور المصنفة التمييز بين المشاة وراكبي الدراجات وعربات التسوق، حتى في ظروف الإضاءة الضعيفة.
لا تعمل هذه الأنظمة بمعزل عن بعضها البعض. فهي تدمج البيانات من مصادر متعددة: توفر الكاميرات تفاصيل بصرية غنية، ويقوم نظام LiDAR بإنشاء خرائط ثلاثية الأبعاد دقيقة، ويكشف الرادار عن الأجسام من خلال الضباب والمطر.
تقوم أنظمة التحكم المتقدمة بفك تشفير بيانات هذه المواد لتحديد العوائق والعلامات الرئيسية، وتحديد مسارات القيادة المناسبة. ويؤدي دمج مدخلات هذه المستشعرات إلى فهم شامل لمحيط المركبة، وهو فهم أكثر دقة مما يمكن أن يوفره أي مستشعر بمفرده.
الشبكات العصبية لاتخاذ القرارات
إن الإدراك ليس سوى الخطوة الأولى. يجب على المركبات ذاتية القيادة تفسير ما تراه وتحديد كيفية الاستجابة.
تقوم الشبكات العصبية العميقة بمعالجة بيانات المستشعرات المدمجة للتنبؤ بكيفية تطور سيناريوهات المرور. فإذا وقف أحد المشاة بالقرب من ممر المشاة، فهل سيعبر إلى الطريق؟ وعندما تضغط سيارة أمامك على الفرامل فجأة، فهل هي حالة طارئة أم مجرد تباطؤ مروري روتيني؟
طوّر باحثون من جامعة كورنيل بقيادة كيليان واينبرغر أنظمةً تُمكّن المركبات ذاتية القيادة من إنشاء "ذاكرة" لتجاربها السابقة واستخدامها في الملاحة المستقبلية. تتعلم هذه المركبات الطرق المألوفة، وتتوقع التقاطعات الصعبة، وتُكيّف سلوكها بناءً على مساراتها السابقة.
يحاكي هذا التعلم القائم على التجربة كيفية تطوير السائقين البشريين للحدس بمرور الوقت. ولكن على عكس البشر، لا تتشتت الأنظمة ذاتية القيادة أبدًا، ولا تتعب، ولا تعاني من أي خلل.
تخطيط المسار والتحكم فيه
بمجرد أن تفهم المركبة بيئتها وتتوقع ما قد يحدث لاحقًا، تحتاج إلى تخطيط مسار آمن. تقوم خوارزميات التعلم الآلي بتقييم آلاف المسارات المحتملة في أجزاء من الثانية، وتختار الطرق التي توازن بين السلامة والكفاءة وراحة الركاب.
يجب أن تراعي أنظمة التخطيط هذه القيود الفيزيائية، فالمركبات لا تستطيع الانعطاف بشكل فوري أو التوقف فجأة. كما أنها تتضمن الأعراف الاجتماعية: يتوقع البشر سلوكيات قيادة معينة، والمركبات ذاتية القيادة التي تخالف هذه الأعراف (حتى وإن كانت قانونية من الناحية الفنية) تخلق مواقف خطيرة.
تدريب نماذج التعلم الآلي للسيارات ذاتية القيادة
يتطلب بناء الشبكات العصبية التي يمكنها التنقل بأمان في حركة المرور في العالم الحقيقي كميات هائلة من البيانات وأساليب تدريب متطورة.
تحدي البيانات
تجمع شركات المركبات ذاتية القيادة بيتابايتات من بيانات القيادة. تسجل الكاميرات وأجهزة الاستشعار وأنظمة المركبات كل رحلة، وتلتقط كل من السيناريوهات الروتينية والحالات الاستثنائية - تلك المواقف النادرة والخطيرة التي تختبر حدود نماذج التعلم الآلي.
تشير تحليلات القطاع إلى أن قيمة سوق البيانات المولدة من المركبات ستتراوح بين 450 مليار و750 مليار دولار بحلول عام 2030. ولا يقتصر هذا على حجم البيانات فحسب، بل يشمل أيضاً قيمتها في تدريب الأنظمة المتطورة باستمرار.
لكن البيانات الخام وحدها لا تكفي. يجب على المهندسين تصنيفها: تحديد المشاة والمركبات وخطوط المسارات وإشارات المرور وآلاف العناصر الأخرى في ملايين الصور وعمليات مسح المستشعرات. عملية التصنيف هذه تستغرق وقتًا طويلاً ومكلفة، لكنها ضرورية للتعلم الخاضع للإشراف.
المحاكاة والبيانات الاصطناعية
إن اختبار المركبات ذاتية القيادة على الطرق العامة فقط سيتطلب مليارات الأميال لمواجهة عدد كافٍ من السيناريوهات النادرة. وهنا يأتي دور المحاكاة.
تُتيح أجهزة المحاكاة عالية الدقة إنشاء بيئات افتراضية تمكّن المهندسين من اختبار كيفية استجابة المركبات لمواقف بالغة الخطورة أو نادرة الحدوث في ظروف القيادة الواقعية. ماذا يحدث عندما يقفز أحد المشاة إلى الطريق؟ كيف ينبغي للمركبة أن تستجيب لانفجار إطار على الطريق السريع؟
تساعد البيانات الاصطناعية المُولَّدة عبر المحاكاة في سدّ الثغرات في مجموعات البيانات الواقعية. توفر هذه السيناريوهات المُحاكاة أمثلة تدريبية قد تستغرق سنوات لمواجهتها بشكل طبيعي.
هندسة التعلم العميق
تخدم بنى التعلم الآلي المختلفة أغراضًا متنوعة في أنظمة القيادة الذاتية. تتفوق الشبكات العصبية الالتفافية في التعرف على الصور واكتشاف الأجسام. أما الشبكات العصبية المتكررة والمحولات فتتعامل مع البيانات المتسلسلة، وتتنبأ بكيفية تطور سيناريوهات المرور بمرور الوقت.
تعتمد أساليب التعلم الشاملة، التي طورتها شركات رائدة مثل Drive.ai، على ربط مدخلات المستشعرات مباشرةً بمخرجات التحكم. تتعلم هذه الأنظمة القيادة من خلال مراقبة العروض التوضيحية البشرية، واكتشاف أنماط قد تغفل عنها الأنظمة التقليدية القائمة على القواعد.
لكن التحدي يكمن هنا: نماذج التعلم العميق غالباً ما تكون "صناديق سوداء". فعندما تتخذ الشبكة العصبية قراراً، لا يستطيع المهندسون دائماً تفسير السبب. وهذا يمثل مشكلة عند تصحيح الأخطاء أو إثبات سلامة الأنظمة للهيئات التنظيمية.
معايير السلامة والاختبارات للأنظمة المستقلة
السلامة ليست خياراً بالنسبة للمركبات ذاتية القيادة. إنها الشرط الأساسي الذي يحدد ما إذا كان بإمكان هذه الأنظمة العمل على الطرق العامة.
اختبار تغطية الحالة/القرار المعدل
تستخدم البرمجيات الحيوية في مجال الطيران معيار تغطية الحالة/القرار المعدل (MCDC) كمعيار للاختبار، وفقًا لأبحاث المعهد الوطني للمعايير والتكنولوجيا (NIST) حول الأنظمة المستقلة. يتطلب هذا المعيار الصارم أن يأخذ كل قرار ضمن الكود جميع النتائج المحتملة، وأن يأخذ كل شرط ضمن كل قرار جميع النتائج المحتملة، وأن يؤثر كل شرط بشكل مستقل على نتيجة القرار.
ما المشكلة؟ اختبار MCDC يستهلك موارد كثيرة. وفقًا لأبحاث المعهد الوطني للمعايير والتكنولوجيا (NIST) حول الأنظمة المستقلة، فإن طريقة الاختبار الرئيسية للبرمجيات الحيوية، مثل تلك المستخدمة في الطيران، هي تغطية الحالة/القرار المعدلة (MCDC)، والتي تتطلب اختبارًا شاملًا لنتائج القرار.
بالنسبة للمركبات ذاتية القيادة التي تحتوي على ملايين الأسطر البرمجية والشبكات العصبية التي تضم مليارات المعاملات، تصبح أساليب الاختبار متعددة المعايير التقليدية غير عملية. تُنتج أساليب الاختبار التوافقية سيناريوهات اختبار حرجة أكثر تميزًا بكثير من الأساليب الأساسية، مما يجعل الاختبار الشامل أكثر جدوى.
الأطر التنظيمية
تختلف المناهج المتبعة في تنظيم المركبات ذاتية القيادة من منطقة لأخرى. ففي أوروبا، تشترط الأطر التنظيمية التابعة لنظام الأمم المتحدة على المصنّعين إثبات سلامة هذه المركبات قبل طرحها في السوق، على عكس بعض الولايات القضائية الأمريكية التي تسمح بالتصديق الذاتي.
بحسب باحثين من جامعة RWTH آخن، فإن الأطر التنظيمية الأوروبية التي تشترط إثبات سلامة سلوك المركبات ذاتية القيادة بموجب نظام الأمم المتحدة تهدف إلى تجنب 99.9991% من حالات الحوادث التي تُشاهد في الأنظمة الأقل صرامة. وهذا يتناقض مع المناهج التي تسمح باختبارات أكثر تساهلاً مع تحقق مسبق أقل دقة.
تتناول معايير IEEE مثل P3474 النوايا البشرية ومواءمة الذكاء الاصطناعي في القيادة الذاتية، مما يؤدي إلى وضع أطر عمل لضمان تصرف أنظمة الذكاء الاصطناعي بطرق تتوافق مع التوقعات البشرية ومتطلبات السلامة.
قابلية التفسير والشفافية
عندما ترتكب مركبة ذاتية القيادة خطأً، يحتاج المحققون إلى فهم السبب. وهذا يتطلب أنظمة ذكاء اصطناعي قابلة للتفسير يمكنها تقديم رؤى حول عمليات اتخاذ القرار.
تؤكد الأبحاث المتعلقة باختبار المركبات ذاتية القيادة على أهمية الشفافية في عمليات اتخاذ القرار في أنظمة الذكاء الاصطناعي، وبروتوكولات تقييم متانة الأنظمة التنبؤية وسلوكها الأخلاقي. فبدون الشفافية، يصبح بناء ثقة الجمهور وتلبية المتطلبات التنظيمية شبه مستحيل.
يجب أن توازن نماذج التعلم الآلي بين الأداء وسهولة التفسير. في بعض الأحيان، تكون النماذج الأبسط التي يمكن للمهندسين فهمها تمامًا أفضل من أنظمة التعلم العميق الأكثر دقة بشكل طفيف ولكنها غامضة.

تحسين نماذج القيادة الذاتية باستخدام الذكاء الاصطناعي المتفوق
تتطلب أنظمة القيادة الذاتية نماذج تعلم آلي موثوقة يمكنها معالجة البيانات المرئية وبيانات المستشعرات والبيانات البيئية في ظل ظروف متغيرة. متفوقة الذكاء الاصطناعي يدعم الفرق العاملة على أنظمة مدفوعة بالذكاء الاصطناعي للملاحة والإدراك والتنبؤ والأتمتة المتعلقة بالقيادة.
بإمكان شركة AI Superior مساعدة فرق القيادة الذاتية في:
- مراجعة مجموعات بيانات القيادة وأجهزة الاستشعار وحركة المرور
- تحديد حالة استخدام التعلم الآلي للقيادة الذاتية
- بناء أنظمة إثبات المفهوم
- تطوير نماذج الرؤية الحاسوبية والتنبؤية
- اختبار أداء النموذج وموثوقيته
- تخطيط التكامل في بيئات برامج المركبات
- دعم النشر وتحسين النموذج
بالنسبة للقيادة الذاتية، قد يشمل ذلك اكتشاف المسار، والتعرف على الأشياء، وتحليل مشهد القيادة، والتنبؤ بالمسار، وتحليل سلوك المرور، وأنظمة الذكاء الاصطناعي المتعلقة بالملاحة.
تواصل مع شركة AI Superior لمناقشة توجه المشروع.
التحديات التي تواجه التعلم الآلي في القيادة الذاتية
على الرغم من التقدم الملحوظ، لا تزال هناك عقبات كبيرة قبل أن تصبح المركبات ذاتية القيادة بالكامل شائعة.
الحالات الاستثنائية والسيناريوهات النادرة
تتفوق نماذج التعلم الآلي في السيناريوهات الشائعة التي شاهدتها آلاف المرات أثناء التدريب. لكن القيادة تنطوي على مجموعة لا حصر لها من المواقف غير المألوفة: مناطق الإنشاءات ذات علامات المسارات المربكة، وإشارات اليد من ضباط الشرطة لتنظيم حركة المرور، وسقوط أشياء من الشاحنات في الأمام.
تُشكّل هذه الحالات الاستثنائية - النادرة فرديًا ولكنها حتمية مجتمعة - التحدي الأكبر. فالشبكة العصبية التي تعمل بكفاءة تامة بنسبة 99.99% من الوقت، لا تزال تواجه مواقف خطيرة بشكل منتظم عند معالجة القرارات عدة مرات في الثانية لساعات.
بصراحة: لا يمكن لأي قدر من الاختبارات أن يضمن أن النظام قد واجه كل السيناريوهات المحتملة. يجب على المهندسين بناء نماذج قابلة للتعميم بشكل جيد على المواقف الجديدة، مع إدراك متى تكون غير مؤكدة والاستجابة بشكل متحفظ.
الهجمات المعادية والأمن
يمكن خداع نماذج التعلم الآلي. فقد أظهر الباحثون أن التعديلات الطفيفة على إشارات التوقف - التي لا يلاحظها البشر - يمكن أن تتسبب في تصنيف الشبكات العصبية لها بشكل خاطئ على أنها إشارات تحديد السرعة.
تؤكد الأبحاث المتعلقة بالتعلم الآلي القابل للتفسير لتأمين المركبات الذكية أن تعقيد الشبكات العصبية يخلق ثغرات أمنية. ومع اتصال المركبات بالشبكات الخارجية عبر تقنية الاتصال بين المركبات وكل شيء (V2X)، تصبح هذه المركبات أهدافًا محتملة للهجمات الإلكترونية.
يتطلب تأمين هذه الأنظمة دفاعًا متعدد الطبقات: اتصالات مشفرة، واكتشاف الشذوذ، وأنظمة أمان زائدة لا تعتمد فقط على مخرجات التعلم الآلي.
اتخاذ القرارات الأخلاقية
عندما يكون الاصطدام أمراً لا مفر منه، كيف ينبغي للمركبة ذاتية القيادة أن تقرر ما يجب فعله؟ إن سيناريوهات معضلة العربة هذه - على الرغم من ندرتها - تثير تساؤلات جوهرية حول أخلاقيات البرمجة في الخوارزميات.
هل ينبغي أن تعطي المركبات الأولوية لسلامة الركاب فوق كل شيء؟ هل ينبغي أن تقلل من إجمالي الضرر؟ هل ينبغي أن تلتزم بالقواعد القانونية الصارمة؟ تختلف الثقافات والأفراد حول هذه الأسئلة، ومع ذلك يتعين على الأنظمة ذاتية القيادة اتخاذ قرارات في أجزاء من الثانية.
يتناول مشروع معيار IEEE بشأن النوايا البشرية ومواءمة الذكاء الاصطناعي في القيادة الذاتية هذه التحديات، محاولاً إنشاء أطر عمل لضمان توافق سلوك الذكاء الاصطناعي مع القيم والتوقعات البشرية.
التحديات البيئية
لا تُحقق نماذج التعلّم الآلي المُدرّبة أساسًا على طرق كاليفورنيا المشمسة أداءً جيدًا بالضرورة في عواصف بوسطن الثلجية. إذ تُحجب أجهزة الاستشعار بالمطر والثلج والضباب، وتختفي علامات المسارات تحت غطاء الثلج، وتختلف ظروف الإضاءة اختلافًا كبيرًا بين النهار والليل.
يتطلب بناء أنظمة قوية تدريبها على بيانات متنوعة من مناطق جغرافية وظروف جوية وأنماط مرور مختلفة. وهذا أحد أسباب إجراء اختبارات المركبات ذاتية القيادة في بيئات ومناخات متعددة.
التطبيقات العملية والنشر الحالي
المركبات ذاتية القيادة ليست مجرد تجارب معملية. إنها تعمل اليوم في بيئات خاضعة لرقابة دقيقة، مع توسع قدراتها بشكل مطرد.
خدمات التوصيل للميل الأخير وخدمات النقل
تُستخدم المركبات ذاتية القيادة كحافلات نقل للميل الأخير في بيئات مُحكمة مثل الجامعات والمجمعات التجارية. تُقلل هذه التطبيقات منخفضة السرعة في بيئات قابلة للتنبؤ من التعقيد الذي يتعين على المهندسين التعامل معه.
تتيح هذه التطبيقات للشركات تحسين تحديد المواقع، واتصالات المركبات بالبنية التحتية (V2X)، والتفاعل بين الإنسان والآلة دون مواجهة فوضى القيادة في المدن. كما أنها تُظهر قيمتها للعملاء المحتملين وتساعد في بناء قبول عام لها.
القيادة على الطرق السريعة وأنظمة مساعدة السائق المتقدمة
توفر أنظمة القيادة الآلية من المستوى 2+ - محور بحث SAE International حول جعل القيادة الآلية مربحة وشائعة - مساعدة على الطرق السريعة تحافظ على المركبات في منتصف المسارات، وتحافظ على مسافات آمنة للمتابعة، وتتعامل مع مهام القيادة الروتينية.
تعتمد هذه الأنظمة بشكل كبير على التعلم الآلي في الإدراك واتخاذ القرارات، لكنها تُبقي على مسؤولية القيادة العامة للبشر. وهي تمثل الوضع الحالي للأتمتة المتاحة تجارياً لمعظم المستهلكين.
عمليات حضرية محددة جغرافياً
تُشغّل بعض الشركات مركبات ذاتية القيادة بالكامل دون سائقين بشريين، ولكن فقط في مناطق حضرية محددة بدقة ذات ظروف مواتية. تتيح هذه التطبيقات المحددة جغرافياً تطوير التكنولوجيا في بيئات خاضعة للرقابة قبل التوسع إلى بيئات أكثر تحدياً.
أثرت جائحة كوفيد-19 على جداول التطوير. ففي الصين، وبينما واجه سوق السيارات بشكل عام تحديات، أظهر قطاع السيارات الكهربائية والمتصلة نموًا قويًا وحقق انتشارًا قياسيًا في السوق خلال فترة الجائحة. لكن التطوير استمر، واستأنفت عمليات النشر نموها منذ ذلك الحين.
| نوع التطبيق | مستوى الأتمتة | التحديات الرئيسية في مجال التعلم الآلي | الوضع الحالي |
|---|---|---|---|
| مساعدة الطريق السريع | المستوى 2+ | نظام الحفاظ على المسار، ونظام تثبيت السرعة التكيفي | متوفر تجارياً |
| خدمة النقل للميل الأخير | المستوى 4 (محدود) | اكتشاف الأجسام منخفضة السرعة، وتخطيط المسار | عمليات نشر محدودة |
| المناطق الحضرية ذات السياج الجغرافي | المستوى 4 | حركة مرور معقدة، التنبؤ بحركة المشاة | برامج تجريبية |
| الاستقلالية الكاملة | المستوى 5 | جميع السيناريوهات، جميع الظروف | مرحلة البحث |
الاتجاهات المستقبلية في مجال التعلم الآلي للمركبات ذاتية القيادة
يستمر هذا المجال في التطور بسرعة. وستشكل العديد من الاتجاهات الناشئة الجيل القادم من أنظمة القيادة الذاتية.
بنى المحولات وآليات الانتباه
تُستخدم نماذج المحولات - وهي البنية التي تقف وراء الإنجازات الحديثة في معالجة اللغة الطبيعية - حاليًا في القيادة الذاتية. إن قدرتها على التركيز على السمات ذات الصلة عبر سياقات مكانية وزمنية واسعة تجعلها مناسبة تمامًا لفهم سيناريوهات المرور المعقدة.
تستطيع هذه النماذج معالجة المعلومات من عدة مستشعرات في آن واحد، وتتعلم أي المدخلات هي الأكثر أهمية في مختلف ظروف القيادة. كما أنها تتفوق في التنبؤ بكيفية تطور المشاهد بمرور الوقت، وهي قدرة بالغة الأهمية للملاحة الآمنة.
التعلم الموحد والخصوصية
تُنتج المركبات ذاتية القيادة كميات هائلة من البيانات، الكثير منها قد يكون حساسًا. يسمح التعلم الموحد للمركبات بتحسين نماذجها من خلال التعلم من الخبرة الجماعية دون الحاجة إلى مركزة البيانات الأولية.
تتدرب المركبات الفردية على بياناتها المحلية، ثم تشارك تحديثات النموذج بدلاً من البيانات نفسها. يوازن هذا النهج بين فوائد التعلم من التجارب المتنوعة وحماية خصوصية الركاب والمشاة.
التعلم المعزز من خلال التغذية الراجعة البشرية
يعمل الباحثون على تطوير أساليب تمكن المركبات ذاتية القيادة من التعلم من العروض التوضيحية والتعليقات البشرية. فبدلاً من برمجة كل سلوك بشكل صريح، تراقب هذه الأنظمة السائقين البشريين وتتعلم محاكاة الاستراتيجيات الناجحة.
يضمن التعلم المعزز الآمن القائم على القيود - وهو بحث نُشر في IEEE Xplore - أن تتعلم المركبات سلوكيات فعالة مع مراعاة حدود السلامة. يستطيع النظام الاستكشاف والتحسين، ولكن ضمن قيود تمنع التصرفات الخطرة أثناء عملية التعلم.
التنسيق بين عدة جهات
عندما تتشارك عدة مركبات ذاتية القيادة الطريق، يمكنها التواصل والتنسيق - مما قد يحسن تدفق حركة المرور والسلامة بما يتجاوز ما يمكن أن تحققه المركبات المستقلة.
تستطيع نماذج التعلم الآلي التي تراعي التفاعلات بين عدة مركبات أن تتنبأ بسلوك المركبات ذاتية القيادة الأخرى، مما يُسهّل عملية الاندماج، وعبور التقاطعات، والسير الجماعي على الطرق السريعة. ويتطلب ذلك أساليب تدريب جديدة لا تقتصر على نمذجة سلوك المركبات الفردية فحسب، بل تشمل أيضاً ديناميكياتها الجماعية.

الشبكات المعززة بالذاكرة
تشير الأبحاث التي أجرتها جامعة كورنيل حول المركبات ذاتية القيادة التي تُنشئ "ذكريات" من التجارب السابقة إلى اتجاه أوسع. إذ يمكن للشبكات العصبية المُعززة بالذاكرة تخزين واسترجاع معلومات حول مواقع محددة، وأنماط حركة المرور، والاستراتيجيات الناجحة.
بدلاً من التعامل مع كل رحلة كمشكلة مستقلة، تبني هذه الأنظمة قواعد معرفية تُحسّن الأداء على الطرق المألوفة مع إمكانية تعميمها على مناطق جديدة. هذا النهج يُحاكي كيفية اكتساب السائقين البشريين للمعرفة المحلية بمرور الوقت.
تطوير نماذج التعلم الآلي والتحقق من صحتها لمركبات الإنتاج ذاتية القيادة
يتطلب تحويل أنظمة التعلم الآلي من نماذج أولية بحثية إلى مركبات ذاتية القيادة جاهزة للإنتاج عمليات هندسية دقيقة.
إدارة خطوط البيانات
تؤكد أبحاث جمعية مهندسي السيارات الدولية (SAE International) حول جمع البيانات ومعالجتها للمركبات ذاتية القيادة على مدى تعقيد إدارة بيانات التدريب على نطاق واسع. ويتعين على المؤسسات جمع مجموعات البيانات وتصنيفها وإصدار نسخ منها وتنسيقها مع الحفاظ على معايير الجودة.
عندما يكون أداء النموذج ضعيفًا، يحتاج المهندسون إلى تتبع أسباب الفشل وصولًا إلى مشاكل في بيانات التدريب. هل افتقرت مجموعة البيانات إلى أمثلة لسيناريو معين؟ هل كانت التصنيفات غير صحيحة؟ هل اختلف التوزيع في العالم الحقيقي عن ظروف التدريب؟
تتطلب إدارة خطوط نقل البيانات الفعالة أدوات لتتبع مصدر البيانات، وقياس تنوع مجموعات البيانات، وتحديد الثغرات في التغطية.
نقل المحاكاة إلى الواقع
يجب أن تنتقل النماذج التي تم تدريبها بشكل أساسي في بيئة المحاكاة بنجاح إلى بيئة التشغيل الواقعية. وتشكل هذه الفجوة بين المحاكاة والواقع تحديات لأن برامج المحاكاة لا تستطيع محاكاة كل جانب من جوانب البيئات المادية بشكل كامل.
تساعد تقنيات تكييف المجال النماذج على التعميم من بيانات التدريب الاصطناعية إلى مدخلات المستشعرات الحقيقية. وتعمل هذه الأساليب على ضبط الاختلافات في المظهر، وضوضاء المستشعرات، والديناميكيات الفيزيائية بين المحاكاة والواقع.
لكن التحقق في نهاية المطاف يتطلب اختباراً عملياً. تُسرّع المحاكاة عملية التطوير، لكنها لا تستطيع أن تحل محل التقييم على الطرق بشكل كامل.
التكامل والاختبار المستمران
لا يمكن أن يتبع تطوير البرمجيات للمركبات ذاتية القيادة دورات الإصدار التقليدية. يجب أن تتحسن الأنظمة باستمرار مع قيام المهندسين بجمع المزيد من البيانات، وتحسين النماذج، وإصلاح المشكلات.
تقوم خطوط التكامل المستمر باختبار إصدارات النماذج الجديدة تلقائيًا في مجموعة واسعة من السيناريوهات، بدءًا من الاختبارات العملية الواقعية وصولًا إلى الحالات الاستثنائية المحاكاة. يتم اكتشاف الأخطاء قبل النشر، ويتم التحقق من صحة التحسينات بشكل منهجي.
يشجع المعهد الوطني للمعايير والتكنولوجيا (NIST) الابتكار ويعزز الثقة في تصميم وتطوير واستخدام وإدارة أنظمة الذكاء الاصطناعي للمركبات ذاتية القيادة. وتساعد أطره المؤسسات على وضع معايير اختبار تعزز الثقة في سلامة النظام.
التحديثات والمراقبة عبر الهواء
تتلقى المركبات ذاتية القيادة المنتشرة تحديثات البرامج عن بعد، مما يسمح للشركات بإصلاح الأخطاء وتحسين الأداء وإضافة القدرات دون الحاجة إلى عمليات استدعاء فعلية.
لكن هذه التحديثات تنطوي على مخاطر. فقد يؤثر تحديث معيب على أسطول كامل في آن واحد. لذا، تعتمد استراتيجيات النشر المدروسة على تطبيق التغييرات تدريجياً، مع مراقبة مؤشرات الأداء قبل النشر الكامل.
تساعد المراقبة المستمرة للأنظمة المنشورة على تحديد المشكلات مبكراً. يكشف نظام اكتشاف الحالات الشاذة عن السلوكيات غير المعتادة، ويمكن للمركبات الإبلاغ عن السيناريوهات التي واجهت فيها صعوبات، مما يساعد المهندسين على تحديد المجالات التي تحتاج إلى تحسين.
| مرحلة التطوير | الأنشطة الرئيسية | أساليب التحقق | مقاييس النجاح |
|---|---|---|---|
| جمع البيانات | تسجيل البيانات من المستشعرات، ووضع العلامات، والتنسيق. | تحليل التغطية، وفحوصات الجودة | تنوع السيناريوهات، ودقة التصنيفات |
| التدريب النموذجي | اختيار البنية، ضبط المعلمات الفائقة | التحقق المتبادل، تقييم مجموعة الاختبار | دقة الإدراك، خطأ التنبؤ |
| اختبار المحاكاة | توليد السيناريوهات الافتراضية | تغطية الحالات الحدية، تحليل أنماط الفشل | معدل النجاح، وتكرار التدخل |
| اختبار القيادة | التحقق من صحة النتائج في العالم الحقيقي | عدد الأميال لكل عملية فصل، تدخلات سائق السلامة | نسبة التشغيل المستقل |
| تعيين | نشر تدريجي، ومراقبة | تتبع أداء الأسطول، وتحليل الحوادث | مقاييس السلامة، رضا المستخدم |
بنى التعلم الآلي الخاصة بالقيادة الذاتية
تؤدي بنى الشبكات العصبية المختلفة وظائف مختلفة في مجموعة أدوات المركبات ذاتية القيادة.
شبكات الكشف عن الأجسام
تقوم نماذج مثل YOLO (أنت تنظر مرة واحدة فقط) و Faster R-CNN بالكشف عن الأجسام وتصنيفها في صور الكاميرا. تعالج هذه الشبكات العصبية الالتفافية الصور في الوقت الفعلي، وترسم مربعات محيطة حول المشاة والمركبات وراكبي الدراجات وغيرهم من مستخدمي الطريق.
لا تقتصر شبكات الكشف الحديثة على تحديد الأجسام الموجودة فحسب، بل تقوم أيضاً بتقدير المسافة، والتنبؤ بالحركة، وتقييم عدم اليقين. وتساعد هذه المخرجات الإضافية أنظمة التخطيط اللاحقة على اتخاذ قرارات أفضل.
التجزئة الدلالية
بدلاً من رسم مربعات حول الأشياء، يقوم التجزئة الدلالية بتعيين تصنيف لكل بكسل في الصورة: الطريق، الرصيف، المركبة، المبنى، السماء، النباتات.
يساعد هذا الفهم على مستوى البكسل المركبات ذاتية القيادة على فهم الأسطح الصالحة للقيادة، وتحديد حدود المسارات، والتمييز بين أنواع العوائق المختلفة. كما تكشف نماذج التجزئة عن علامات الطرق، وممرات المشاة، وغيرها من معالم الرصف المهمة للملاحة.
النماذج الزمنية للتنبؤ
يجب على المركبات ذاتية القيادة التنبؤ بكيفية تطور سيناريوهات المرور خلال الثواني القليلة القادمة. تقوم الشبكات العصبية المتكررة والشبكات العصبية الالتفافية الزمنية بمعالجة سلاسل الملاحظات للتنبؤ بالحالات المستقبلية.
تتعلم هذه النماذج أن المشاة بالقرب من ممرات المشاة أكثر عرضة لعبور الطريق، وأن تباطؤ المركبات في المقدمة غالباً ما يشير إلى ازدحام مروري، وأن إشارات الانعطاف تتنبأ بتغيير المسارات. يسمح التنبؤ الدقيق للأنظمة ذاتية القيادة بالتخطيط الاستباقي بدلاً من رد الفعل.
التعلم الشامل
تتجاوز بعض الأساليب وحدات الإدراك والتنبؤ الصريحة، وتتعلم الربط المباشر بين مدخلات المستشعرات ومخرجات التحكم. تراقب الشبكات الشاملة قيادة الإنسان وتتعلم محاكاة السلوكيات الناجحة.
تستطيع هذه الأنظمة اكتشاف أنماط دقيقة تغفل عنها خطوط المعالجة المصممة يدويًا. لكنها تُضحي بسهولة التفسير؛ فعندما يحدث خطأ ما، يصبح تصحيح الأخطاء أكثر صعوبة لعدم وجود فصل واضح بين حالات فشل الإدراك والتنبؤ والتخطيط.
الأسئلة الشائعة
كيف تستخدم المركبات ذاتية القيادة تقنيات التعلم الآلي لاكتشاف المشاة؟
تستخدم المركبات ذاتية القيادة شبكات عصبية التفافية مُدرَّبة على ملايين الصور المُصنَّفة لاكتشاف المشاة في لقطات الكاميرا. تُحدِّد هذه النماذج أشكال الأشخاص ووضعياتهم وأنماط حركتهم حتى في الظروف الصعبة كالإضاءة الخافتة أو الحجب الجزئي. يجمع دمج البيانات الحسية بين بيانات الكاميرا ومدخلات LiDAR والرادار لتأكيد عمليات الاكتشاف وتقدير مواقع المشاة بدقة. يتتبع النظام المشاة المكتشفين باستمرار، ويتنبأ بمساراتهم المحتملة لتجنب الاصطدامات.
ما الفرق بين القيادة الذاتية من المستوى الثاني والقيادة الذاتية من المستوى الرابع؟
توفر أنظمة المستوى الثاني ميزات مساعدة السائق مثل نظام تثبيت السرعة التكيفي والحفاظ على المسار، لكن يبقى على السائق مراقبة البيئة المحيطة والاستعداد لتولي القيادة فورًا. أما أنظمة المستوى الرابع، فتتولى جميع مهام القيادة ضمن ظروف محددة - كالمناطق الحضرية أو الطرق السريعة ذات النطاق الجغرافي المحدد - دون تدخل بشري، مع إمكانية طلبها المساعدة عند الاقتراب من حدود نطاقها التشغيلي. وتختلف متطلبات التعلم الآلي اختلافًا كبيرًا: إذ تحتاج أنظمة المستوى الرابع إلى قدرات إدراك وتنبؤ وتخطيط أكثر قوة للعمل بأمان دون تدخل بشري.
ما مقدار الاختبارات المطلوبة قبل أن تتمكن المركبات ذاتية القيادة من العمل بأمان؟
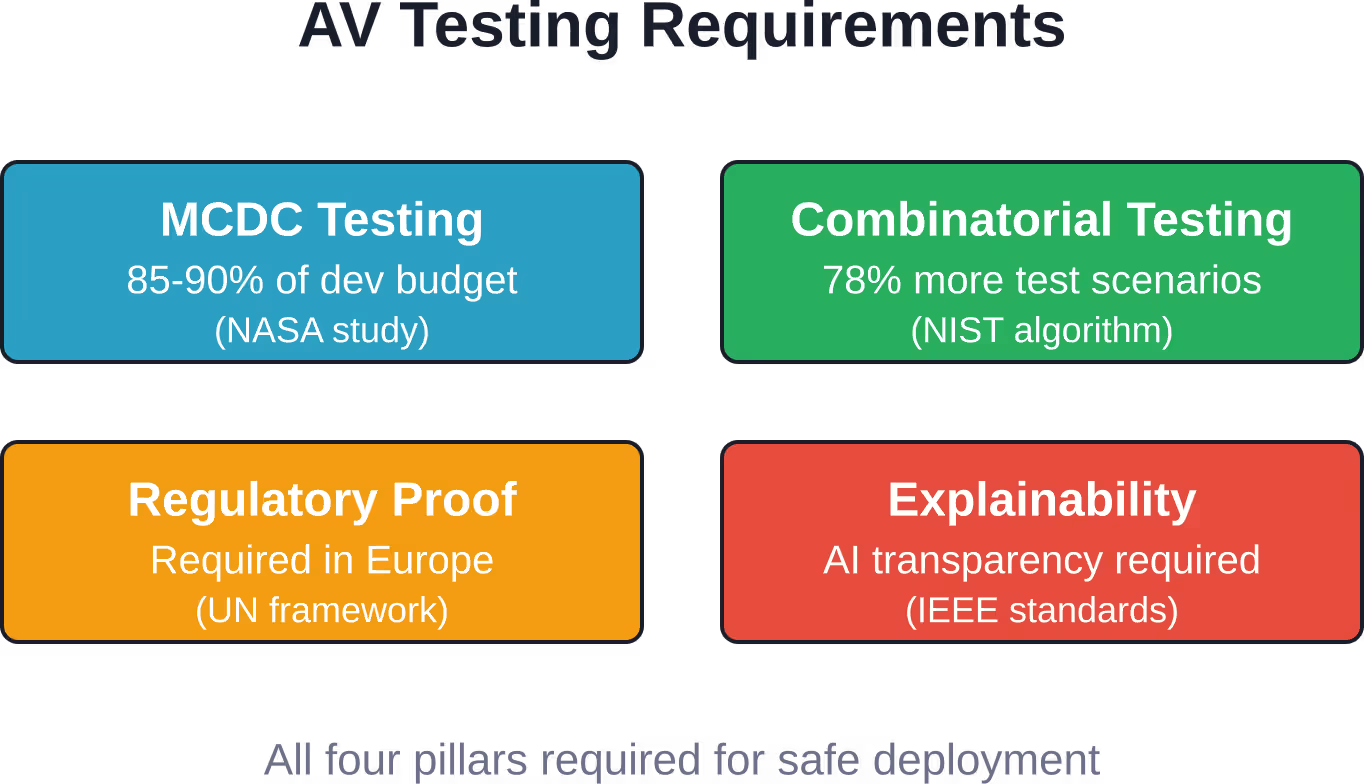
وفقًا لمعايير الصناعة، تُشكّل عمليات التحقق والاختبار (بما في ذلك MCDC) عادةً ما بين 50% و70% من إجمالي تكاليف تطوير البرمجيات بالغة الأهمية للسلامة. بالنسبة للمركبات ذاتية القيادة، يتطلب الاختبار الشامل ملايين الأميال من القيادة في ظروف واقعية، بالإضافة إلى مليارات الأميال المحاكاة التي تغطي الحالات الاستثنائية. وتُلزم الأطر التنظيمية الأوروبية الشركات المصنعة بإثبات السلوك الآمن قبل النشر، بدلاً من السماح بالشهادة الذاتية. وتُنتج أساليب الاختبار التوافقية الجديدة من المعهد الوطني للمعايير والتكنولوجيا (NIST) 78% سيناريوهات اختبار حرجة أكثر تميزًا من الأساليب الأساسية، مما يجعل التحقق الشامل أكثر جدوى.
هل تستطيع المركبات ذاتية القيادة التعامل مع الظروف الجوية السيئة؟
لا يزال الطقس أحد أكبر التحديات التي تواجه أنظمة التعلم الآلي للمركبات ذاتية القيادة. فالأمطار الغزيرة والثلوج والضباب تُضعف أداء المستشعرات، حيث تفقد الكاميرات وضوحها، وتتشتت إشارات الليدار بسبب الهطول، وتختفي علامات الطرق تحت غطاء الثلج. تعمل الأنظمة الحالية بأفضل كفاءة في الطقس الصافي، وقد تطلب تدخلاً بشرياً أو تُقلل من قدراتها التشغيلية في الظروف الجوية القاسية. ويعمل الباحثون على تطوير نماذج مقاومة للظروف الجوية، مُدرَّبة على بيانات مناخية متنوعة، ويستكشفون استراتيجيات دمج البيانات الحسية التي تستفيد من نقاط القوة النسبية لكل مستشعر في ظل ظروف مختلفة.
كيف تتعلم المركبات ذاتية القيادة من التجربة؟
طوّر باحثون في جامعة كورنيل أنظمةً تُمكّن المركبات ذاتية القيادة من إنشاء "ذاكرة" لرحلاتها السابقة واستخدامها في الملاحة المستقبلية. تخزّن هذه المركبات معلوماتٍ حول التقاطعات الصعبة، وأنماط حركة المرور في أوقات مختلفة من اليوم، والاستراتيجيات الناجحة للطرق المألوفة. تُحسّن هذه الأنظمة المُعزّزة بالذاكرة الأداء من خلال الخبرة، مع الحفاظ على قدرتها على التعامل مع البيئات الجديدة. تُحدّث نماذج التعلّم الآلي باستمرار مع جمع المركبات المزيد من البيانات، وتخضع هذه التحديثات لاختبارات صارمة قبل نشرها لضمان عدم إدخال تحسينات جديدة تُشكّل مخاطر جديدة.
ما الذي يمنع المتسللين من خداع أنظمة الذكاء الاصطناعي للمركبات ذاتية القيادة؟
تُحدد الأبحاث المتعلقة بالتعلم الآلي القابل للتفسير لتأمين المركبات الذكية عدة وسائل دفاعية ضد الهجمات المُعادية. فوجود أنظمة استشعار متعددة يزيد من صعوبة الهجمات، إذ يتطلب خداع كل من الكاميرات وجهاز LiDAR في آنٍ واحد ثغرات أمنية أكثر تعقيدًا. كما تُشير أنظمة كشف الشذوذ إلى الأنماط غير المعتادة التي قد تدل على هجمات أو أعطال في أجهزة الاستشعار. وتمنع اتصالات V2X المشفرة انتحال الرسائل. وتضمن مناهج الدفاع المتعمق أنه حتى في حال اختراق أحد الأنظمة، فإن الوظائف الحيوية للسلامة تتمتع بحماية احتياطية. ومع ذلك، لا يزال تأمين الشبكات العصبية المعقدة ضد جميع الهجمات المحتملة تحديًا بحثيًا قائمًا.
متى ستتوفر المركبات ذاتية القيادة بالكامل على نطاق واسع؟
لا يزال الجدول الزمني للوصول إلى المستوى الخامس من القيادة الذاتية الكاملة - أي المركبات القادرة على التعامل مع جميع السيناريوهات في جميع الظروف - غير واضح. وتركز عمليات النشر الحالية على أنظمة المستوى الرابع التي تعمل في مناطق محددة جغرافياً ذات ظروف مواتية. وقد أثبت الانتقال من موثوقية 99% إلى موثوقية 99.999% أو أفضل، اللازمة للتشغيل غير الخاضع للإشراف في جميع البيئات، أنه أكثر صعوبة مما أشارت إليه التوقعات الأولية. وتشير تحليلات القطاع إلى أن عمليات نشر المستوى الرابع المحدودة ستتوسع تدريجياً حتى عام 2030، على أن يعتمد اعتمادها على نطاق أوسع على حل التحديات التقنية المتبقية المتعلقة بالحالات الاستثنائية، ومقاومة الظروف الجوية، والموافقات التنظيمية.
الطريق أمامنا
لقد حوّلت تقنيات التعلّم الآلي المركبات ذاتية القيادة من حلم بعيد إلى واقع متنامٍ. تُمكّن الشبكات العصبية أنظمة إدراك تُضاهي الرؤية البشرية، ونماذج تنبؤ تتوقع سلوك السائق، وخوارزميات تخطيط تُسهّل التنقل في حركة المرور المعقدة.
لكن لا تزال هناك تحديات كبيرة. فالحالات الاستثنائية لا تزال تُربك حتى أكثر الأنظمة تطوراً. ويؤثر الطقس سلباً على أداء أجهزة الاستشعار. وتكافح الأطر التنظيمية لمواكبة القدرات التكنولوجية. كما أن معيار الموثوقية 99.999% اللازم لكسب ثقة الجمهور يتطلب حل مشكلات تقع على هامش قدرات التعلم الآلي الحالية.
يجمع المسار المستقبلي بين الابتكار التقني والتحقق الدقيق. تعد بنى المحولات وآليات الانتباه بفهم أفضل للمشاهد. يتيح التعلم الموحد تحسينًا يحافظ على الخصوصية من خلال الخبرة الجماعية. يُنشئ التعلم المعزز الآمن مع التغذية الراجعة البشرية أنظمة تتعلم مع احترام حدود الأمان.
تضمن معايير الاختبار الصادرة عن المعهد الوطني للمعايير والتكنولوجيا (NIST)، وأطر السلامة الصادرة عن معهد مهندسي الكهرباء والإلكترونيات (IEEE)، والمتطلبات التنظيمية في أوروبا وغيرها، استيفاء المركبات ذاتية القيادة لمتطلبات السلامة الصارمة قبل نشرها على نطاق واسع. قد تُبطئ هذه الضوابط عملية التطوير، لكنها ضرورية لبناء أنظمة موثوقة.
بلغت قيمة سوق المركبات ذاتية القيادة العالمية حوالي 1.50 إلى 80 مليار دولار أمريكي في عام 2020 (بحسب نطاق أنظمة المستوى 3+)، وقد نما السوق بوتيرة أسرع بكثير من التوقعات الأولية. وبحلول عام 2025، وصل حجم السوق إلى ما يقارب 1.200 إلى 3.00 مليار دولار أمريكي، ومن المتوقع أن يصل إلى 1.250 إلى أكثر من 4.00 مليار دولار أمريكي في عام 2026، مع توقعات العديد من المحللين باستمرار معدل نمو سنوي مركب قوي برقمين (30-35 مليار دولار أمريكي أو أكثر في السيناريوهات المتفائلة).
تتطور تكنولوجيا المركبات ذاتية القيادة، وتتوسع عمليات نشرها، وتستمر قدرات التعلم الآلي في التحسن.
بالنسبة للمهندسين العاملين في هذا المجال، فإن التحديات هائلة، لكن التأثير المحتمل تحويلي. يمكن للمركبات ذاتية القيادة أن تقلل من وفيات حوادث المرور، وتحسن التنقل للأشخاص غير القادرين على القيادة، وتعيد تشكيل النقل الحضري بشكل جذري.
يجب أن تكون أنظمة التعلم الآلي التي تُمكّن هذا التحول قوية وآمنة وجديرة بالثقة. وهذا يتطلب ليس فقط ابتكارًا خوارزميًا، بل عمليات هندسية دقيقة، واختبارات شاملة، وأطر تنظيمية تُعطي الأولوية للسلامة العامة.
يتم بناء مستقبل القيادة الذاتية اليوم - شبكة عصبية واحدة، وسيناريو اختبار واحد، وتحقق واحد من السلامة في كل مرة.