Resumen rápido: El aprendizaje automático permite a los vehículos autónomos percibir su entorno, tomar decisiones en tiempo real y mejorar la seguridad mediante redes neuronales, visión artificial y fusión de sensores. Los modelos de aprendizaje profundo procesan datos de cámaras, LiDAR y radar para detectar objetos, predecir comportamientos y navegar en escenarios de tráfico complejos. Estándares de prueba como MCDC y marcos de trabajo del NIST garantizan que estos sistemas cumplan con los requisitos de seguridad antes de su implementación.
Los vehículos autónomos ya no son ciencia ficción. Circulan por las ciudades, aprenden de millones de kilómetros recorridos y están transformando el funcionamiento del transporte.
¿Cuál es la clave de esta transformación? El aprendizaje automático. Redes neuronales capaces de detectar peatones en milisegundos, algoritmos que predicen las acciones de otros conductores y sistemas que mejoran con cada viaje.
El mercado global de vehículos autónomos se valoró en alrededor de 1.400 millones a 80.000 millones de dólares en 2020 (dependiendo del alcance de los sistemas de nivel 3+) y ha crecido significativamente más rápido de lo previsto inicialmente. Para 2025, el mercado alcanzó aproximadamente los 1.400 millones a 300.000 millones de dólares, y en 2026 se estima que llegará a los 1.400 millones a más de 400.000 millones de dólares, con muchos analistas proyectando una CAGR sólida y continua de dos dígitos (30-351.300 millones de dólares o más en escenarios optimistas).
Ese crecimiento explosivo no se debe únicamente al hardware, sino que está impulsado por los avances en inteligencia artificial que hacen que los vehículos sean más inteligentes, más seguros y más capaces.
Pero aquí está la clave: crear sistemas de aprendizaje automático para la conducción autónoma no es como desarrollar un motor de recomendaciones o un chatbot. Cuando un algoritmo comete un error, la vida de las personas está en peligro.
Esto plantea desafíos únicos. ¿Cómo entrenan los ingenieros las redes neuronales para afrontar situaciones que nunca han visto? ¿Qué estándares de prueba garantizan que estos sistemas sean lo suficientemente seguros para circular por vías públicas? ¿Y cómo logran los organismos reguladores equilibrar la innovación con la seguridad pública?
Cómo el aprendizaje automático impulsa los sistemas de vehículos autónomos
El aprendizaje automático no solo ayuda a los vehículos autónomos, sino que los hace posibles. Sin redes neuronales que procesen los datos de los sensores en tiempo real, los coches autónomos no podrían funcionar.
La pila tecnológica se divide en varias capas interconectadas.
Percepción mediante visión artificial
Los algoritmos de visión artificial analizan las imágenes de las cámaras para identificar objetos, leer señales y comprender la geometría de la carretera. Las redes neuronales convolucionales, entrenadas con millones de imágenes etiquetadas, pueden distinguir entre un peatón, un ciclista y un carrito de la compra, incluso en condiciones de poca luz.
Estos sistemas no funcionan de forma aislada. Combinan datos de múltiples fuentes: las cámaras proporcionan gran detalle visual, el LiDAR crea mapas 3D precisos y el radar detecta objetos a través de la niebla y la lluvia.
Los sistemas de control avanzados decodifican estos datos materiales para identificar obstáculos y marcadores clave, determinando así la trayectoria adecuada. La fusión de las señales de estos sensores crea una comprensión integral del entorno del vehículo, más precisa que la que podría proporcionar cualquier sensor individual.
Redes neuronales para la toma de decisiones
La percepción es solo el primer paso. Los vehículos autónomos deben interpretar lo que ven y decidir cómo responder.
Las redes neuronales profundas procesan los datos combinados de los sensores para predecir cómo se desarrollarán los escenarios de tráfico. Si un peatón se encuentra cerca de un paso de cebra, ¿cruzará la calzada? Cuando un coche frena bruscamente delante, ¿se trata de una emergencia o de una ralentización rutinaria del tráfico?
Investigadores de Cornell, liderados por Kilian Weinberger, han desarrollado sistemas que permiten a los vehículos autónomos crear "memorias" de experiencias previas y utilizarlas en la navegación futura. Estos vehículos aprenden rutas conocidas, anticipan intersecciones difíciles y adaptan su comportamiento en función de recorridos anteriores.
Este aprendizaje basado en la experiencia imita cómo los conductores humanos desarrollan la intuición con el tiempo. Pero a diferencia de los humanos, los sistemas autónomos nunca se distraen, se cansan ni se ven afectados.
Planificación y control de trayectorias
Una vez que el vehículo comprende su entorno y predice lo que podría suceder a continuación, necesita planificar una trayectoria segura. Los algoritmos de aprendizaje automático evalúan miles de posibles rutas en milisegundos, seleccionando aquellas que equilibran la seguridad, la eficiencia y la comodidad de los pasajeros.
Estos sistemas de planificación deben tener en cuenta las limitaciones físicas: los vehículos no pueden girar instantáneamente ni detenerse en seco. También incorporan convenciones sociales: los humanos esperan ciertos comportamientos al volante, y los vehículos autónomos que infringen esas normas (aunque sean técnicamente legales) crean situaciones peligrosas.
Entrenamiento de modelos de aprendizaje automático para coches autónomos
La creación de redes neuronales capaces de navegar de forma segura por el tráfico del mundo real requiere enormes cantidades de datos y métodos de entrenamiento sofisticados.
El desafío de los datos
Las empresas de vehículos autónomos recopilan petabytes de datos de conducción. Cámaras, sensores y sistemas del vehículo registran cada viaje, capturando tanto escenarios rutinarios como casos excepcionales: esas situaciones raras y peligrosas que ponen a prueba los límites de los modelos de aprendizaje automático.
Según análisis del sector, se prevé que el mercado de datos generados por vehículos alcance un valor de entre 1.450.000 y 1.750.000 millones de dólares para 2030. Esto se debe no solo al volumen de datos, sino también a su valor para el entrenamiento de sistemas cada vez más avanzados.
Pero los datos brutos no son suficientes. Los ingenieros deben etiquetarlos: marcando peatones, vehículos, líneas de carril, señales de tráfico y miles de otros elementos en millones de imágenes y escaneos de sensores. Este proceso de etiquetado es laborioso y costoso, pero esencial para el aprendizaje supervisado.
Simulación y datos sintéticos
Probar vehículos autónomos exclusivamente en carreteras públicas requeriría recorrer miles de millones de kilómetros para encontrar suficientes escenarios poco comunes. Ahí es donde entra en juego la simulación.
Los simuladores de alta fidelidad crean entornos virtuales donde los ingenieros pueden probar cómo responden los vehículos ante situaciones demasiado peligrosas o poco frecuentes para reproducirlas en la conducción real. ¿Qué ocurre cuando un peatón se lanza al tráfico? ¿Cómo debería reaccionar el vehículo ante un neumático reventado a alta velocidad?
Los datos sintéticos generados mediante simulación ayudan a llenar los vacíos en los conjuntos de datos del mundo real. Estos escenarios simulados proporcionan ejemplos de entrenamiento que tardaríamos años en encontrar de forma natural.
Arquitecturas de aprendizaje profundo
En los sistemas de conducción autónoma, las distintas arquitecturas de aprendizaje automático cumplen diferentes funciones. Las redes neuronales convolucionales destacan en el reconocimiento de imágenes y la detección de objetos. Las redes neuronales recurrentes y los transformadores procesan datos secuenciales, prediciendo cómo evolucionarán los escenarios de tráfico con el tiempo.
Los enfoques de aprendizaje integral, impulsados por empresas como Drive.ai, asignan directamente las entradas de los sensores a las salidas de control. Estos sistemas aprenden a conducir observando demostraciones humanas y descubriendo patrones que los sistemas tradicionales basados en reglas podrían pasar por alto.
Pero aquí radica el problema: los modelos de aprendizaje profundo suelen ser "cajas negras". Cuando una red neuronal toma una decisión, los ingenieros no siempre pueden explicar el porqué. Esto supone un problema a la hora de depurar fallos o demostrar a los organismos reguladores que los sistemas son seguros.
Normas de seguridad y pruebas para sistemas autónomos
La seguridad no es opcional para los vehículos autónomos. Es el requisito fundamental que determina si estos sistemas pueden operar en vías públicas.
Pruebas de cobertura de condiciones/decisiones modificadas
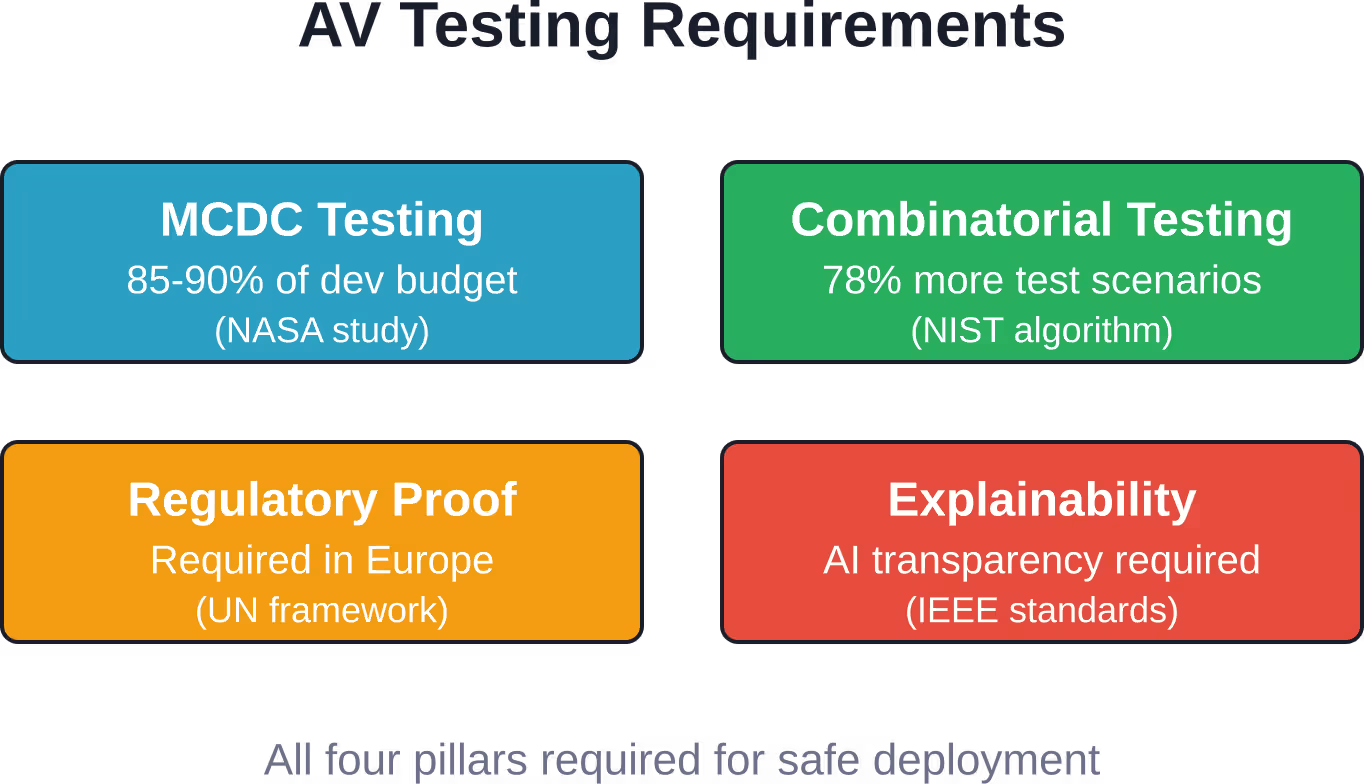
Según una investigación del NIST sobre sistemas autónomos, el software crítico para la vida en la aviación utiliza la Cobertura de Condición/Decisión Modificada (MCDC, por sus siglas en inglés) como criterio de prueba. Este riguroso estándar exige que cada decisión dentro del código contemple todos los resultados posibles, que cada condición dentro de cada decisión contemple todos los resultados posibles y que cada condición afecte de forma independiente al resultado de la decisión.
¿El problema? Las pruebas MCDC requieren muchos recursos. Según las investigaciones del NIST sobre sistemas autónomos, el método de prueba clave para software crítico para la vida, como el de la aviación, es la Cobertura de Condición/Decisión Modificada (MCDC), que requiere pruebas exhaustivas de los resultados de las decisiones.
Para vehículos autónomos con millones de líneas de código y redes neuronales con miles de millones de parámetros, los enfoques tradicionales de MCDC resultan poco prácticos. Los métodos de pruebas combinatorias generan escenarios de prueba críticos significativamente más distintos que los enfoques básicos, lo que hace que las pruebas exhaustivas sean más factibles.
Marcos regulatorios
Las distintas regiones adoptan enfoques diferentes en cuanto a la regulación de los vehículos autónomos. En Europa, los marcos regulatorios del régimen de la ONU exigen que los fabricantes demuestren un comportamiento seguro antes de su despliegue, a diferencia de algunas jurisdicciones estadounidenses que permiten la autocertificación.
Según investigadores de la Universidad RWTH Aachen, los marcos regulatorios europeos que exigen pruebas de un comportamiento seguro de los vehículos autónomos bajo el régimen de la ONU buscan evitar el 99,9991% de los casos de incidentes que se observan en jurisdicciones menos estrictas. Esto contrasta con enfoques que permiten pruebas más permisivas con una validación previa menos rigurosa.
Las normas IEEE, como la P3474, abordan la alineación entre las intenciones humanas y la inteligencia artificial en la conducción autónoma, estableciendo marcos para garantizar que los sistemas de IA se comporten de manera que se ajusten a las expectativas humanas y a los requisitos de seguridad.
Explicabilidad y transparencia
Cuando un vehículo autónomo comete un error, los investigadores necesitan comprender el porqué. Para ello, se requieren sistemas de IA explicables que puedan aportar información sobre sus procesos de toma de decisiones.
Las investigaciones sobre las pruebas de vehículos autónomos destacan la importancia de la explicabilidad en los procesos de toma de decisiones de la IA y los protocolos para evaluar la robustez y el comportamiento ético de los sistemas predictivos. Sin transparencia, generar confianza pública y cumplir con los requisitos regulatorios se vuelve prácticamente imposible.
Los modelos de aprendizaje automático deben equilibrar el rendimiento con la interpretabilidad. A veces, los modelos más sencillos que los ingenieros pueden comprender completamente son preferibles a los sistemas de aprendizaje profundo, que si bien son ligeramente más precisos, resultan opacos.

Mejorar los modelos de conducción autónoma con IA superior
Los sistemas de conducción autónoma requieren modelos de aprendizaje automático fiables que puedan procesar datos visuales, de sensores y ambientales en condiciones cambiantes. IA superior Brinda soporte a equipos que trabajan en sistemas basados en inteligencia artificial para navegación, percepción, predicción y automatización relacionada con la conducción.
AI Superior puede ayudar a los equipos de conducción autónoma con:
- Revisión de conjuntos de datos de conducción, sensores y tráfico.
- Definición del caso de uso de aprendizaje automático para la conducción autónoma
- Construcción de sistemas de prueba de concepto
- Desarrollo de modelos predictivos y de visión artificial
- Pruebas de rendimiento y fiabilidad del modelo
- Integración de la planificación en los entornos de software de los vehículos
- Apoyo a la implementación y al perfeccionamiento del modelo.
En el caso de la conducción autónoma, esto puede incluir la detección de carriles, el reconocimiento de objetos, el análisis de la escena de conducción, la predicción de trayectorias, el análisis del comportamiento del tráfico y los sistemas de IA relacionados con la navegación.
Contacta con AI Superior para discutir la dirección del proyecto.
Desafíos que enfrenta el aprendizaje automático en la conducción autónoma
A pesar de los notables avances, aún quedan importantes obstáculos antes de que los vehículos totalmente autónomos se generalicen.
Casos extremos y escenarios de cola larga
Los modelos de aprendizaje automático sobresalen en escenarios comunes que han visto miles de veces durante el entrenamiento. Pero conducir presenta una variedad infinita de situaciones inusuales: zonas de construcción con marcas de carril confusas, señales manuales de agentes de policía que dirigen el tráfico, objetos que caen de los camiones que van delante.
Estos casos excepcionales —individualmente raros pero colectivamente inevitables— representan el mayor desafío. Una red neuronal que funciona a la perfección el 99,991% del tiempo aún se enfrenta a situaciones peligrosas con regularidad al procesar decisiones varias veces por segundo durante horas.
Seamos realistas: ninguna cantidad de pruebas puede garantizar que un sistema haya experimentado todos los escenarios posibles. Los ingenieros deben crear modelos que se generalicen bien a situaciones nuevas, reconociendo la incertidumbre y respondiendo con cautela.
Ataques adversarios y seguridad
Los modelos de aprendizaje automático pueden ser engañados. Investigadores han demostrado que modificaciones sutiles en las señales de stop —imperceptibles para los humanos— pueden provocar que las redes neuronales las clasifiquen erróneamente como señales de límite de velocidad.
Las investigaciones sobre el aprendizaje automático explicable para vehículos inteligentes seguros destacan que la complejidad de las redes neuronales genera vulnerabilidades. A medida que los vehículos se conectan a redes externas mediante comunicaciones vehículo a todo (V2X), se convierten en objetivos potenciales de ciberataques.
Para garantizar la seguridad de estos sistemas se requiere una defensa en profundidad: comunicaciones cifradas, detección de anomalías y sistemas de seguridad redundantes que no dependan únicamente de los resultados del aprendizaje automático.
Toma de decisiones éticas
Cuando un choque es inevitable, ¿cómo debería decidir qué hacer un vehículo autónomo? Estos escenarios del dilema del tranvía —aunque poco frecuentes— plantean cuestiones fundamentales sobre la ética en la programación de algoritmos.
¿Deben los vehículos priorizar la seguridad de los pasajeros por encima de todo? ¿Minimizar los daños totales? ¿Cumplir con normas legales estrictas? Diferentes culturas e individuos discrepan sobre estas cuestiones, pero los sistemas autónomos deben tomar decisiones en fracciones de segundo.
El borrador de la norma IEEE sobre la alineación de las intenciones humanas y la inteligencia artificial en la conducción autónoma aborda estos desafíos, intentando crear marcos para garantizar que el comportamiento de la IA se alinee con los valores y las expectativas humanas.
Desafíos ambientales
Los modelos de aprendizaje automático entrenados principalmente en carreteras soleadas de California no necesariamente funcionan bien en las ventiscas de Boston. Los sensores quedan ocultos por la lluvia, la nieve y la niebla. Las marcas viales desaparecen bajo la nieve. Las condiciones de iluminación varían drásticamente entre el día y la noche.
Para construir sistemas robustos se requiere entrenamiento con datos diversos provenientes de diferentes regiones geográficas, condiciones climáticas y patrones de tráfico. Por eso, las pruebas de vehículos autónomos se realizan en múltiples climas y entornos.
Aplicaciones en el mundo real e implementaciones actuales
Los vehículos autónomos no son solo experimentos de laboratorio. Ya operan en entornos cuidadosamente controlados y sus capacidades se expanden constantemente.
Entrega de última milla y servicios de transporte
Las cápsulas autónomas funcionan como vehículos de transporte de última milla en entornos controlados como campus universitarios y parques empresariales. Estas aplicaciones de baja velocidad en entornos predecibles reducen la complejidad que deben gestionar los ingenieros.
Estas implementaciones permiten a las empresas perfeccionar la localización, las comunicaciones V2X y la interacción hombre-máquina sin enfrentarse al caos propio de la conducción urbana. Además, demuestran su valor a los clientes potenciales y contribuyen a generar aceptación pública.
Conducción en autopista y asistencia avanzada al conductor
Los sistemas de conducción automatizada de nivel 2 o superior —el foco de la investigación de SAE International para lograr que la conducción automatizada sea rentable y de uso generalizado— proporcionan asistencia en carretera que mantiene los vehículos centrados en los carriles, mantiene distancias de seguimiento seguras y gestiona las tareas de conducción rutinarias.
Estos sistemas dependen en gran medida del aprendizaje automático para la percepción y la toma de decisiones, pero mantienen a los humanos como responsables de la conducción en general. Representan el estado actual de la automatización disponible comercialmente para la mayoría de los consumidores.
Operaciones urbanas geocercadas
Algunas empresas operan vehículos totalmente autónomos sin conductores de seguridad humanos, pero solo en áreas urbanas cuidadosamente delimitadas con condiciones favorables. Estos despliegues geolocalizados permiten que la tecnología madure en entornos controlados antes de expandirse a entornos más exigentes.
La pandemia de COVID-19 afectó los plazos de desarrollo. En China, si bien el mercado automotriz en general enfrentó dificultades, el segmento de vehículos eléctricos y conectados mostró un crecimiento sólido y alcanzó una penetración de mercado récord durante la pandemia. Sin embargo, el desarrollo continuó y, desde entonces, el crecimiento en las implementaciones se ha reanudado.
| Tipo de aplicación | Nivel de automatización | Principales desafíos del aprendizaje automático | Estado actual |
|---|---|---|---|
| Asistencia en carretera | Nivel 2+ | Asistente de mantenimiento de carril, control de crucero adaptativo | Disponible comercialmente |
| Servicios de transporte de última milla | Nivel 4 (limitado) | Detección de objetos a baja velocidad, planificación de rutas | Despliegues limitados |
| Zona urbana geocercada | Nivel 4 | Tráfico complejo, predicción de peatones | Programas piloto |
| Autonomía total | Nivel 5 | Todos los escenarios, todas las condiciones | Fase de investigación |
Tendencias futuras en el aprendizaje automático para vehículos autónomos
El sector sigue evolucionando rápidamente. Varias tendencias emergentes darán forma a la próxima generación de sistemas de conducción autónoma.
Arquitecturas de transformadores y mecanismos de atención
Los modelos Transformer —la arquitectura que sustenta los recientes avances en el procesamiento del lenguaje natural— se están adaptando ahora para la conducción autónoma. Su capacidad para identificar características relevantes en amplios contextos espaciales y temporales los hace idóneos para comprender escenarios de tráfico complejos.
Estos modelos pueden procesar información de múltiples sensores simultáneamente, aprendiendo qué datos son más relevantes para diferentes situaciones de conducción. Además, destacan por su capacidad para predecir cómo evolucionarán las escenas con el tiempo, una habilidad fundamental para una navegación segura.
Aprendizaje federado y privacidad
Los vehículos autónomos generan enormes cantidades de datos, muchos de ellos potencialmente sensibles. El aprendizaje federado permite que los vehículos mejoren sus modelos aprendiendo de la experiencia colectiva sin centralizar los datos brutos.
Los vehículos individuales se entrenan con sus datos locales y luego comparten las actualizaciones del modelo en lugar de los datos en sí. Este enfoque equilibra los beneficios del aprendizaje a partir de diversas experiencias con la protección de la privacidad de pasajeros y peatones.
Aprendizaje por refuerzo a partir de la retroalimentación humana
Los investigadores están desarrollando métodos para que los vehículos autónomos aprendan de las demostraciones y la retroalimentación de los humanos. En lugar de programar explícitamente cada comportamiento, estos sistemas observan a los conductores humanos y aprenden a imitar las estrategias exitosas.
El aprendizaje por refuerzo seguro basado en restricciones —una investigación publicada en IEEE Xplore— garantiza que los vehículos aprendan comportamientos eficaces respetando los límites de seguridad. El sistema puede explorar y optimizar, pero dentro de restricciones que previenen acciones peligrosas durante el proceso de aprendizaje.
Coordinación multiagente
Cuando varios vehículos autónomos comparten la carretera, pueden comunicarse y coordinarse, lo que potencialmente mejora el flujo del tráfico y la seguridad más allá de lo que podrían lograr los vehículos independientes.
Los modelos de aprendizaje automático que consideran las interacciones entre múltiples agentes pueden predecir el comportamiento de otros vehículos autónomos, lo que permite una incorporación más fluida, el cruce de intersecciones y la conducción en convoy en autopistas. Esto requiere nuevos enfoques de entrenamiento que modelen no solo el comportamiento individual de los vehículos, sino también la dinámica colectiva.

Redes neuronales con memoria aumentada
La investigación de Cornell sobre vehículos autónomos que crean "recuerdos" de experiencias previas apunta a una tendencia más amplia. Las redes neuronales con memoria aumentada pueden almacenar y recuperar información sobre ubicaciones específicas, patrones de tráfico y estrategias exitosas.
En lugar de tratar cada viaje como un problema independiente, estos sistemas construyen bases de conocimiento que mejoran el rendimiento en rutas conocidas, al tiempo que se generalizan a nuevas áreas. Este enfoque refleja cómo los conductores humanos desarrollan conocimiento local con el tiempo.
Desarrollo y validación de modelos de aprendizaje automático para vehículos autónomos de producción.
Para que los sistemas de aprendizaje automático pasen de ser prototipos de investigación a vehículos autónomos listos para la producción, se requieren procesos de ingeniería rigurosos.
Gestión de canalización de datos
La investigación de SAE International sobre la adquisición y el manejo de datos para vehículos autónomos destaca la complejidad de gestionar datos de entrenamiento a gran escala. Las organizaciones deben recopilar, etiquetar, versionar y organizar conjuntos de datos manteniendo los estándares de calidad.
Cuando un modelo tiene un rendimiento deficiente, los ingenieros deben rastrear los fallos hasta problemas con los datos de entrenamiento. ¿Acaso el conjunto de datos carecía de ejemplos de un escenario específico? ¿Eran incorrectas las etiquetas? ¿Ha cambiado la distribución del mundo real con respecto a las condiciones de entrenamiento?
La gestión eficaz de los flujos de datos requiere herramientas para rastrear la procedencia de los datos, medir la diversidad de los conjuntos de datos e identificar lagunas en la cobertura.
Transferencia de simulación a realidad
Los modelos entrenados principalmente en simulación deben transferirse con éxito a su funcionamiento en el mundo real. Esta brecha entre la simulación y la realidad plantea desafíos, ya que los simuladores no pueden replicar a la perfección todos los aspectos de los entornos físicos.
Las técnicas de adaptación de dominio ayudan a los modelos a generalizar desde datos de entrenamiento sintéticos a entradas de sensores reales. Estos métodos ajustan las diferencias de apariencia, ruido del sensor y dinámica física entre la simulación y la realidad.
Pero la validación requiere, en última instancia, pruebas en condiciones reales. La simulación acelera el desarrollo, pero no puede reemplazar por completo la evaluación en carretera.
Integración y pruebas continuas
El desarrollo de software para vehículos autónomos no puede seguir los ciclos de lanzamiento tradicionales. Los sistemas deben mejorar continuamente a medida que los ingenieros recopilan más datos, perfeccionan los modelos y solucionan problemas.
Los procesos de integración continua prueban automáticamente las nuevas versiones del modelo frente a una serie de escenarios, tanto pruebas reales como casos límite simulados. De esta forma, se detectan las regresiones antes del despliegue y se validan sistemáticamente las mejoras.
El NIST promueve la innovación y fomenta la confianza en el diseño, desarrollo, uso y gobernanza de los sistemas de inteligencia artificial para vehículos autónomos. Sus marcos de trabajo ayudan a las organizaciones a establecer estándares de prueba que generan confianza en la seguridad del sistema.
Actualizaciones y monitorización inalámbricas
Los vehículos autónomos desplegados reciben actualizaciones de software de forma remota, lo que permite a las empresas corregir errores, mejorar el rendimiento y añadir funcionalidades sin necesidad de realizar retiradas físicas del mercado.
Pero estas actualizaciones generan riesgos. Una actualización defectuosa podría afectar simultáneamente a toda una flota. Las estrategias de implementación cuidadosas despliegan los cambios gradualmente, supervisando las métricas de rendimiento antes del despliegue completo.
La monitorización continua de los sistemas desplegados ayuda a identificar problemas con antelación. La detección de anomalías señala comportamientos inusuales, y los vehículos pueden informar sobre situaciones en las que presentaron dificultades, lo que ayuda a los ingenieros a identificar áreas de mejora.
| Fase de desarrollo | Actividades clave | Métodos de validación | Métricas de éxito |
|---|---|---|---|
| Recopilación de datos | Registro, etiquetado y curación de datos mediante sensores. | Análisis de cobertura, controles de calidad | Diversidad de escenarios, precisión de las etiquetas |
| Entrenamiento de modelos | Selección de arquitectura, ajuste de hiperparámetros | Validación cruzada, evaluación del conjunto de prueba | Precisión de la percepción, error de predicción |
| Pruebas de simulación | Generación de escenarios virtuales | Cobertura de casos extremos, análisis de modos de fallo | Tasa de aprobación, frecuencia de intervención |
| Pruebas en carretera | La validación en el mundo real impulsa | Kilómetros por desconexión, intervenciones de seguridad del conductor | Porcentaje de operación autónoma |
| Despliegue | Implementación gradual y seguimiento | Seguimiento del rendimiento de la flota, análisis de incidentes | Métricas de seguridad, satisfacción del usuario |
Arquitecturas de aprendizaje automático específicas para la conducción autónoma
Las diferentes arquitecturas de redes neuronales cumplen diferentes funciones en el conjunto de componentes de los vehículos autónomos.
Redes de detección de objetos
Modelos como YOLO (You Only Look Once) y Faster R-CNN detectan y clasifican objetos en imágenes de cámara. Estas redes neuronales convolucionales procesan las imágenes en tiempo real, dibujando recuadros delimitadores alrededor de peatones, vehículos, ciclistas y otros usuarios de la vía.
Las redes de detección modernas no solo identifican los objetos presentes, sino que también estiman la distancia, predicen el movimiento y evalúan la incertidumbre. Estos datos adicionales ayudan a los sistemas de planificación posteriores a tomar mejores decisiones.
Segmentación semántica
En lugar de dibujar recuadros alrededor de los objetos, la segmentación semántica asigna una etiqueta de clase a cada píxel de una imagen: carretera, acera, vehículo, edificio, cielo, vegetación.
Esta comprensión a nivel de píxel ayuda a los vehículos autónomos a entender las superficies transitables, identificar los límites de los carriles y distinguir entre diferentes tipos de obstáculos. Los modelos de segmentación también detectan marcas viales, pasos de peatones y otras características del pavimento fundamentales para la navegación.
Modelos temporales para la predicción
Los vehículos autónomos deben predecir cómo se desarrollarán los escenarios de tráfico en los próximos segundos. Las redes neuronales recurrentes y las redes convolucionales temporales procesan secuencias de observaciones para pronosticar estados futuros.
Estos modelos aprenden que los peatones cerca de los pasos de cebra tienen más probabilidades de cruzar la calle, que los vehículos que reducen la velocidad suelen indicar congestión vehicular y que los intermitentes predicen cambios de carril. Una predicción precisa permite que los sistemas autónomos planifiquen de forma proactiva en lugar de reactiva.
Aprendizaje integral
Algunos enfoques omiten los módulos explícitos de percepción y predicción, aprendiendo asignaciones directas desde las entradas de los sensores hasta las salidas de control. Las redes de extremo a extremo observan la conducción humana y aprenden a imitar comportamientos exitosos.
Estos sistemas pueden descubrir patrones sutiles que los procesos diseñados manualmente pasan por alto. Sin embargo, sacrifican la interpretabilidad: cuando algo falla, la depuración se vuelve más difícil porque no existe una clara distinción entre fallos de percepción, predicción y planificación.
Preguntas frecuentes
¿Cómo utilizan los vehículos autónomos el aprendizaje automático para detectar peatones?
Los vehículos autónomos emplean redes neuronales convolucionales entrenadas con millones de imágenes etiquetadas para detectar peatones en las grabaciones de las cámaras. Estos modelos identifican formas, posturas y patrones de movimiento humanos incluso en condiciones difíciles, como poca luz u oclusión parcial. La fusión de sensores combina los datos de las cámaras con las entradas de LiDAR y radar para confirmar las detecciones y estimar con precisión la posición de los peatones. El sistema realiza un seguimiento continuo de los peatones detectados, prediciendo sus posibles trayectorias para evitar colisiones.
¿Cuál es la diferencia entre la conducción autónoma de nivel 2 y la de nivel 4?
Los sistemas de nivel 2 ofrecen funciones de asistencia al conductor, como control de crucero adaptativo y mantenimiento de carril, pero los conductores siguen siendo responsables de supervisar el entorno y deben estar preparados para tomar el control al instante. Los sistemas de nivel 4 gestionan todas las tareas de conducción en condiciones específicas —como áreas urbanas geocercadas o autopistas— sin intervención humana, aunque pueden solicitar el control al acercarse a sus límites operativos. Los requisitos de aprendizaje automático difieren sustancialmente: los sistemas de nivel 4 necesitan capacidades de percepción, predicción y planificación mucho más robustas para operar de forma segura sin intervención humana.
¿Cuántas pruebas son necesarias antes de que los vehículos autónomos puedan operar de forma segura?
Según los estándares de la industria, la verificación y las pruebas (incluidas las MCDC) suelen representar entre 50% y 70% del costo total de desarrollo del software crítico para la seguridad. Para los vehículos autónomos, las pruebas exhaustivas requieren millones de millas de conducción en condiciones reales, además de miles de millones de millas simuladas que cubran casos extremos. Los marcos regulatorios europeos exigen que los fabricantes demuestren un comportamiento seguro antes del despliegue, en lugar de permitir la autocertificación. Los nuevos métodos de pruebas combinatorias del NIST generan 78% escenarios de prueba críticos más distintos que los enfoques de referencia, lo que hace que la validación exhaustiva sea más factible.
¿Pueden los vehículos autónomos soportar condiciones climáticas adversas?
El clima sigue siendo uno de los mayores desafíos para los sistemas de aprendizaje automático de vehículos autónomos. La lluvia intensa, la nieve y la niebla degradan el rendimiento de los sensores: las cámaras pierden visibilidad, las señales LiDAR se dispersan con la precipitación y las marcas viales desaparecen bajo la nieve. Los sistemas actuales funcionan mejor con buen tiempo y pueden requerir la intervención humana o reducir sus capacidades operativas en condiciones extremas. Los investigadores están desarrollando modelos resistentes a las inclemencias del tiempo, entrenados con diversos datos climáticos, y explorando estrategias de fusión de sensores que aprovechan las ventajas relativas de cada sensor en diferentes condiciones.
¿Cómo aprenden los vehículos autónomos de la experiencia?
Investigadores de Cornell desarrollaron sistemas que permiten a los vehículos autónomos crear "memorias" de recorridos anteriores y utilizarlas para la navegación futura. Los vehículos almacenan información sobre intersecciones difíciles, patrones de tráfico en diferentes momentos del día y estrategias exitosas para rutas conocidas. Estos sistemas, que mejoran su rendimiento gracias a la experiencia, conservan la capacidad de desenvolverse en nuevos entornos. Los modelos de aprendizaje automático se actualizan continuamente a medida que los vehículos recopilan más datos, aunque las actualizaciones se someten a pruebas rigurosas antes de su implementación para garantizar que las mejoras no introduzcan nuevos riesgos.
¿Qué impide a los hackers engañar a los sistemas de IA de los vehículos autónomos?
La investigación sobre el aprendizaje automático explicable para vehículos inteligentes seguros identifica varias defensas contra ataques adversarios. Las modalidades de sensores redundantes dificultan los ataques: engañar simultáneamente a las cámaras y al LiDAR requiere exploits más sofisticados. Los sistemas de detección de anomalías señalan patrones inusuales que podrían indicar ataques o fallos en los sensores. Las comunicaciones V2X cifradas evitan la suplantación de identidad de los mensajes. Los enfoques de defensa en profundidad garantizan que, incluso si un sistema se ve comprometido, las funciones críticas para la seguridad cuenten con protecciones de respaldo. Sin embargo, proteger las redes neuronales complejas contra todos los posibles ataques sigue siendo un reto de investigación activo.
¿Cuándo estarán ampliamente disponibles los vehículos totalmente autónomos?
El cronograma para la autonomía total de Nivel 5 —vehículos capaces de manejar todos los escenarios en todas las condiciones— sigue siendo incierto. Los despliegues actuales se centran en sistemas de Nivel 4 que operan en áreas geocercadas con condiciones favorables. La transición de una fiabilidad del 99,1% a la fiabilidad del 99,9991% o superior, necesaria para el funcionamiento sin supervisión en todos los entornos, está resultando más difícil de lo previsto inicialmente. Los análisis del sector indican que los despliegues limitados de Nivel 4 se expandirán gradualmente hasta 2030, y su adopción generalizada dependerá de la resolución de los desafíos técnicos pendientes relacionados con los casos extremos, la resistencia a las inclemencias del tiempo y la aprobación regulatoria.
El camino por delante
El aprendizaje automático ha transformado los vehículos autónomos, pasando de ser un sueño lejano a una realidad en desarrollo. Las redes neuronales permiten sistemas de percepción que rivalizan con la visión humana, modelos de predicción que anticipan el comportamiento del conductor y algoritmos de planificación que permiten navegar por tráfico complejo.
Pero aún persisten desafíos importantes. Los casos extremos siguen desconcertando incluso a los sistemas más sofisticados. Las condiciones climáticas degradan el rendimiento de los sensores. Los marcos regulatorios tienen dificultades para seguir el ritmo de las capacidades tecnológicas. Y el estándar de confiabilidad del 99,999%, necesario para generar confianza pública, exige resolver problemas que se encuentran en los límites de las capacidades actuales de aprendizaje automático.
El camino a seguir combina la innovación técnica con una validación rigurosa. Las arquitecturas Transformer y los mecanismos de atención prometen una mejor comprensión del entorno. El aprendizaje federado permite una mejora que preserva la privacidad a partir de la experiencia colectiva. El aprendizaje por refuerzo seguro con retroalimentación humana crea sistemas que aprenden respetando los límites de seguridad.
Los estándares de prueba del NIST, los marcos de seguridad del IEEE y los requisitos regulatorios en Europa y otros lugares garantizan que los vehículos autónomos cumplan con estrictos requisitos de seguridad antes de su implementación generalizada. Estas medidas de seguridad pueden ralentizar el desarrollo, pero son esenciales para construir sistemas en los que la gente pueda confiar.
El mercado global de vehículos autónomos se valoró en alrededor de 1.400 millones a 80.000 millones de dólares en 2020 (dependiendo del alcance de los sistemas de nivel 3+) y ha crecido significativamente más rápido de lo previsto inicialmente. Para 2025, el mercado alcanzó aproximadamente los 1.400 millones a 300.000 millones de dólares, y en 2026 se estima que llegará a los 1.400 millones a más de 400.000 millones de dólares, con muchos analistas proyectando una CAGR sólida y continua de dos dígitos (30-351.300 millones de dólares o más en escenarios optimistas).
La tecnología de vehículos autónomos avanza, su implementación se expande y las capacidades de aprendizaje automático siguen mejorando.
Para los ingenieros que trabajan en este campo, los desafíos son inmensos, pero el impacto potencial es transformador. Los vehículos autónomos podrían reducir las muertes por accidentes de tráfico, mejorar la movilidad de las personas que no pueden conducir y transformar radicalmente el transporte urbano.
Los sistemas de aprendizaje automático que posibilitan esta transformación deben ser robustos, seguros y fiables. Esto requiere no solo innovación algorítmica, sino también procesos de ingeniería rigurosos, pruebas exhaustivas y marcos regulatorios que prioricen la seguridad pública.
El futuro de la conducción autónoma se está construyendo hoy: una red neuronal, un escenario de prueba y una validación de seguridad a la vez.