Résumé rapide : L'apprentissage automatique permet aux véhicules autonomes de percevoir leur environnement, de prendre des décisions en temps réel et d'améliorer la sécurité grâce aux réseaux neuronaux, à la vision par ordinateur et à la fusion de données de capteurs. Les modèles d'apprentissage profond traitent les données provenant de caméras, de LiDAR et de radars pour détecter les objets, prédire les comportements et naviguer dans des environnements de circulation complexes. Des normes de test telles que MCDC et les référentiels du NIST garantissent que ces systèmes répondent aux exigences de sécurité avant leur déploiement.
Les véhicules autonomes ne relèvent plus de la science-fiction. Ils sillonnent les villes, apprennent de millions de kilomètres parcourus et transforment en profondeur le fonctionnement des transports.
Au cœur de cette transformation ? L’apprentissage automatique. Des réseaux neuronaux capables de repérer les piétons en quelques millisecondes, des algorithmes qui prédisent les actions des autres conducteurs et des systèmes qui s’améliorent à chaque trajet.
Le marché mondial des véhicules autonomes était évalué à environ 1 400 à 80 milliards de dollars en 2020 (selon l’étendue des systèmes de niveau 3 et plus) et a connu une croissance nettement plus rapide que prévu. D’ici 2025, ce marché devrait atteindre environ 1 400 à 300 milliards de dollars, et en 2026, il est estimé entre 1 400 et plus de 250 milliards de dollars. De nombreux analystes anticipent une forte croissance annuelle composée à deux chiffres (30 à 350 milliards de dollars dans les scénarios les plus optimistes).
Cette croissance explosive ne se limite pas au matériel ; elle est alimentée par les progrès de l’intelligence artificielle qui rendent les véhicules plus intelligents, plus sûrs et plus performants.
Mais voilà le hic : concevoir des systèmes d’apprentissage automatique pour la conduite autonome, ce n’est pas comme développer un moteur de recommandation ou un chatbot. Lorsqu’un algorithme commet une erreur, des vies humaines sont en jeu.
Cela soulève des défis inédits. Comment les ingénieurs entraînent-ils les réseaux neuronaux à gérer des situations jamais rencontrées ? Quelles normes d’essai garantissent la sécurité de ces systèmes sur les routes publiques ? Et comment les autorités de réglementation concilient-elles innovation et sécurité publique ?
Comment l'apprentissage automatique alimente les systèmes de véhicules autonomes
L'apprentissage automatique ne se contente pas d'assister les véhicules autonomes ; il les rend fondamentalement possibles. Sans réseaux neuronaux traitant les données des capteurs en temps réel, les voitures autonomes ne pourraient pas fonctionner.
La pile technologique se décompose en plusieurs couches interconnectées.
Perception par vision par ordinateur
Les algorithmes de vision par ordinateur analysent les flux vidéo des caméras pour identifier les objets, lire les panneaux de signalisation et comprendre la géométrie des routes. Les réseaux neuronaux convolutifs, entraînés sur des millions d'images étiquetées, peuvent distinguer un piéton, un cycliste et un chariot de supermarché, même en conditions de faible luminosité.
Ces systèmes ne fonctionnent pas isolément. Ils fusionnent des données provenant de sources multiples : les caméras fournissent des détails visuels riches, le LiDAR crée des cartes 3D précises et le radar détecte les objets à travers le brouillard et la pluie.
Les systèmes de contrôle avancés décodent ces données matérielles pour identifier les obstacles et les points de repère importants, et déterminer les trajectoires appropriées. La fusion de ces informations issues des capteurs permet une compréhension globale de l'environnement du véhicule, bien plus précise que celle fournie par un seul capteur.
Réseaux neuronaux de prise de décision
La perception n'est que la première étape. Les véhicules autonomes doivent interpréter ce qu'ils voient et décider comment réagir.
Les réseaux neuronaux profonds traitent les données fusionnées des capteurs pour prédire le déroulement des scénarios de circulation. Si un piéton se trouve près d'un passage piéton, va-t-il s'engager sur la chaussée ? Lorsqu'une voiture freine brusquement devant nous, s'agit-il d'une urgence ou d'un ralentissement normal ?
Des chercheurs de Cornell, dirigés par Kilian Weinberger, ont mis au point des systèmes permettant aux véhicules autonomes de “ mémoire ” leurs trajets précédents et de les utiliser pour leurs déplacements futurs. Ces véhicules apprennent les itinéraires familiers, anticipent les intersections complexes et adaptent leur comportement en fonction de leurs trajets antérieurs.
Cet apprentissage par l'expérience imite la façon dont les conducteurs humains développent leur intuition au fil du temps. Mais contrairement aux humains, les systèmes autonomes ne sont jamais distraits, fatigués ou leurs capacités altérées.
Planification et contrôle de trajectoire
Une fois que le véhicule a analysé son environnement et anticipé les événements futurs, il doit planifier une trajectoire sûre. Des algorithmes d'apprentissage automatique évaluent des milliers d'itinéraires potentiels en quelques millisecondes, sélectionnant des routes qui concilient sécurité, efficacité et confort des passagers.
Ces systèmes de planification doivent tenir compte des contraintes physiques : les véhicules ne peuvent pas effectuer de virages instantanés ni s’arrêter net. Ils intègrent également les conventions sociales : les humains attendent certains comportements au volant, et les véhicules autonomes qui enfreignent ces normes (même s’ils sont techniquement légaux) créent des situations dangereuses.
Formation de modèles d'apprentissage automatique pour les voitures autonomes
La construction de réseaux neuronaux capables de naviguer en toute sécurité dans le trafic du monde réel nécessite des quantités massives de données et des approches d'entraînement sophistiquées.
Le défi des données
Les entreprises de véhicules autonomes collectent des pétaoctets de données de conduite. Caméras, capteurs et systèmes embarqués enregistrent chaque trajet, capturant aussi bien les scénarios de routine que les cas limites — ces situations rares et dangereuses qui mettent à l'épreuve les limites des modèles d'apprentissage automatique.
D'après les analyses sectorielles, le marché des données générées par les véhicules devrait atteindre une valeur comprise entre 1 450 et 1 750 milliards de dollars d'ici 2030. Cette valeur s'explique non seulement par le volume de données, mais aussi par leur intérêt pour l'entraînement de systèmes toujours plus performants.
Mais les données brutes ne suffisent pas. Les ingénieurs doivent les annoter : identifier les piétons, les véhicules, les lignes de la chaussée, les panneaux de signalisation et des milliers d’autres éléments dans des millions d’images et de relevés de capteurs. Ce processus d’annotation est long et coûteux, mais indispensable à l’apprentissage supervisé.
Données de simulation et synthétiques
Tester les véhicules autonomes exclusivement sur les routes publiques nécessiterait des milliards de kilomètres pour rencontrer suffisamment de situations rares. C'est là que la simulation intervient.
Les simulateurs haute fidélité créent des environnements virtuels où les ingénieurs peuvent tester le comportement des véhicules face à des situations trop dangereuses ou trop rares pour être rencontrées en conditions de conduite réelles. Que se passe-t-il lorsqu'un piéton traverse la chaussée ? Comment le véhicule doit-il réagir à un pneu crevé à grande vitesse sur l'autoroute ?
Les données synthétiques générées par simulation permettent de combler les lacunes des ensembles de données réelles. Ces scénarios simulés fournissent des exemples d'entraînement qu'il faudrait des années pour rencontrer dans la réalité.
Architectures d'apprentissage profond
Dans les systèmes de conduite autonome, différentes architectures d'apprentissage automatique répondent à différents besoins. Les réseaux de neurones convolutifs excellent dans la reconnaissance d'images et la détection d'objets. Les réseaux de neurones récurrents et les transformeurs traitent les données séquentielles, en prédisant l'évolution du trafic au fil du temps.
Les approches d'apprentissage de bout en bout, mises au point par des entreprises comme Drive.ai, associent directement les données des capteurs aux commandes de sortie. Ces systèmes apprennent à conduire en observant les démonstrations humaines et en découvrant des schémas que les systèmes traditionnels basés sur des règles pourraient ne pas détecter.
Mais voici le problème : les modèles d’apprentissage profond sont souvent des “ boîtes noires ”. Lorsqu’un réseau neuronal prend une décision, les ingénieurs ne peuvent pas toujours en expliquer le raisonnement. Cela pose problème pour le débogage des pannes ou pour prouver aux autorités de réglementation que les systèmes sont sûrs.
Normes de sécurité et essais pour les systèmes autonomes
La sécurité n'est pas une option pour les véhicules autonomes. C'est l'exigence fondamentale qui détermine si ces systèmes peuvent circuler sur les routes publiques.
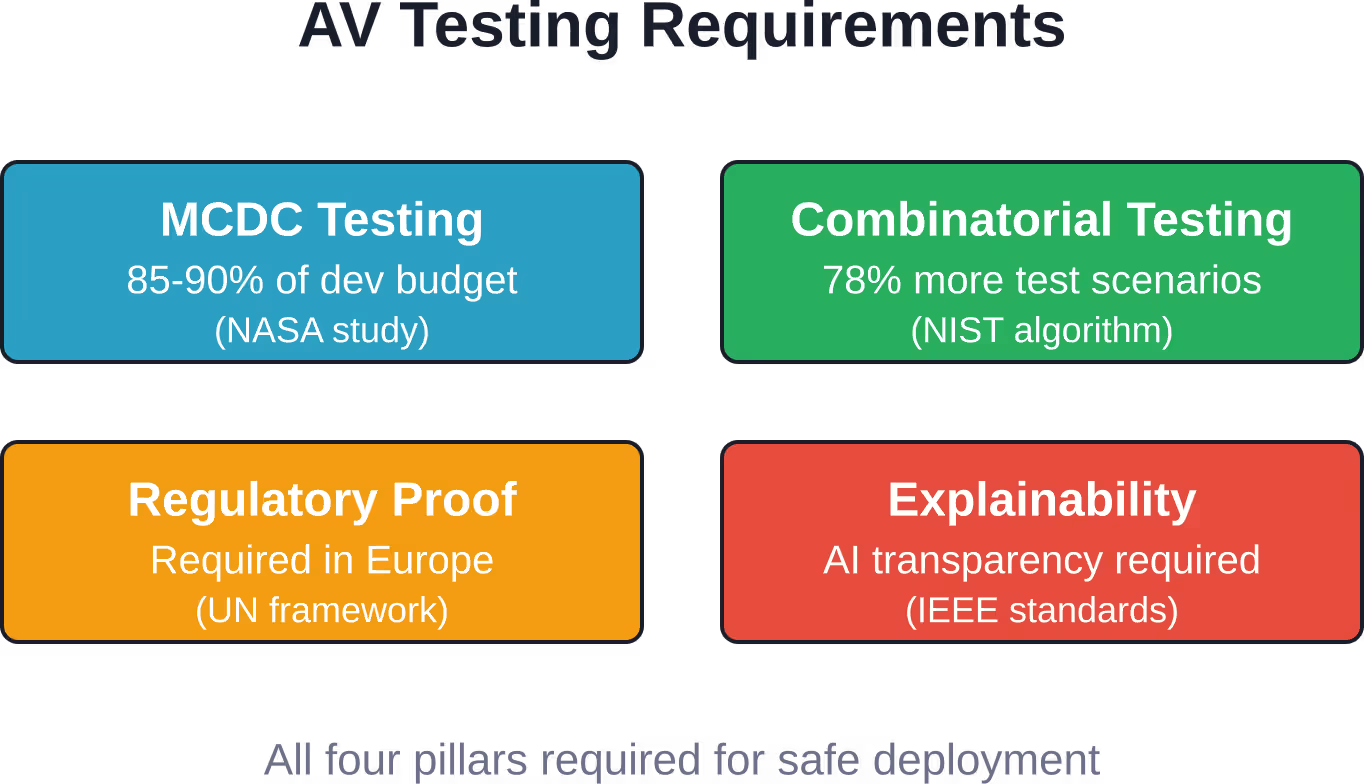
Tests de couverture des conditions/décisions modifiées
Les logiciels critiques en aviation utilisent la norme MCDC (Modified Condition/Decision Coverage) comme critère de test, conformément aux recherches du NIST sur les systèmes autonomes. Cette norme rigoureuse exige que chaque décision prise dans le code prenne en compte tous les résultats possibles, que chaque condition au sein de chaque décision prenne également en compte tous les résultats possibles et que chaque condition influence indépendamment le résultat de la décision.
Le problème ? Les tests MCDC sont gourmands en ressources. Selon une étude du NIST sur les systèmes autonomes, la méthode de test clé pour les logiciels critiques, comme ceux utilisés dans l’aviation, est la couverture conditionnelle/de décision modifiée (MCDC), qui exige des tests exhaustifs des résultats de décision.
Pour les véhicules autonomes comportant des millions de lignes de code et des réseaux neuronaux avec des milliards de paramètres, les approches MCDC traditionnelles deviennent impraticables. Les méthodes de test combinatoires génèrent un nombre considérablement plus important de scénarios de test critiques distincts que les approches de base, rendant ainsi les tests exhaustifs plus réalisables.
Cadres réglementaires
Les différentes régions adoptent des approches différentes en matière de réglementation des véhicules autonomes. En Europe, les cadres réglementaires relevant du régime des Nations Unies exigent des constructeurs qu'ils prouvent la sécurité du véhicule avant sa mise en service, contrairement à certaines juridictions américaines qui autorisent l'autocertification.
D'après des chercheurs de l'université RWTH d'Aix-la-Chapelle, les cadres réglementaires européens exigeant la preuve du comportement sûr des véhicules autonomes selon le régime des Nations Unies visent à éviter 99,9991 % des incidents observés dans les juridictions moins strictes. Ceci contraste avec les approches qui autorisent des tests plus permissifs et une validation préalable moins rigoureuse.
Les normes IEEE telles que la P3474 traitent de l'alignement des intentions humaines et de l'intelligence artificielle dans la conduite autonome, établissant des cadres pour garantir que les systèmes d'IA se comportent de manière à correspondre aux attentes humaines et aux exigences de sécurité.
Explicabilité et transparence
Lorsqu'un véhicule autonome commet une erreur, les enquêteurs doivent en comprendre la cause. Cela nécessite des systèmes d'IA explicables capables d'éclairer leurs processus de décision.
Les recherches sur les essais de véhicules autonomes soulignent l'importance de l'explicabilité des processus et protocoles de prise de décision de l'IA pour évaluer la robustesse et le comportement éthique des systèmes prédictifs. Sans transparence, il devient quasiment impossible de gagner la confiance du public et de satisfaire aux exigences réglementaires.
Les modèles d'apprentissage automatique doivent trouver un équilibre entre performance et interprétabilité. Parfois, des modèles plus simples, que les ingénieurs peuvent parfaitement comprendre, sont préférables à des systèmes d'apprentissage profond légèrement plus précis mais opaques.

Améliorer les modèles de conduite autonome grâce à une IA supérieure
Les systèmes de conduite autonome nécessitent des modèles d'apprentissage automatique fiables, capables de traiter les données visuelles, celles des capteurs et les données environnementales dans des conditions changeantes. IA supérieure soutient les équipes travaillant sur des systèmes pilotés par l'IA pour la navigation, la perception, la prédiction et l'automatisation liée à la conduite.
AI Superior peut aider les équipes de conduite autonome avec :
- Analyse des ensembles de données relatifs à la conduite, aux capteurs et au trafic
- Définition du cas d'utilisation de l'apprentissage automatique pour la conduite autonome
- Systèmes de validation de concept
- Développement de modèles de vision par ordinateur et de prédiction
- Test des performances et de la fiabilité du modèle
- L'intégration de la planification dans les environnements logiciels des véhicules
- Soutien au déploiement et à l'amélioration du modèle
Pour la conduite autonome, cela peut inclure la détection des voies, la reconnaissance des objets, l'analyse de la scène de conduite, la prédiction de la trajectoire, l'analyse du comportement du trafic et les systèmes d'IA liés à la navigation.
Contactez AI Superior pour discuter de l'orientation du projet.
Défis auxquels est confronté l'apprentissage automatique dans la conduite autonome
Malgré des progrès remarquables, des obstacles importants subsistent avant que les véhicules entièrement autonomes ne deviennent monnaie courante.
Cas limites et scénarios à longue traîne
Les modèles d'apprentissage automatique excellent dans les scénarios courants qu'ils ont rencontrés des milliers de fois lors de leur entraînement. Mais la conduite automobile présente une variété infinie de situations inhabituelles : zones de travaux avec marquages au sol confus, signaux manuels des policiers dirigeant la circulation, objets tombant de camions.
Ces cas limites — individuellement rares mais collectivement inévitables — constituent le plus grand défi. Un réseau neuronal fonctionnant parfaitement 99,991 téraoctets sur 3 téraoctets (TP3T) se retrouve néanmoins régulièrement confronté à des situations dangereuses lorsqu'il traite des décisions plusieurs fois par seconde pendant des heures.
Soyons francs : aucun test, aussi poussé soit-il, ne peut garantir qu’un système ait été confronté à tous les scénarios possibles. Les ingénieurs doivent donc concevoir des modèles capables de s’adapter à des situations inédites, de reconnaître les incertitudes et d’adopter une approche prudente.
Attaques adverses et sécurité
Les modèles d'apprentissage automatique peuvent être trompés. Des chercheurs ont démontré que de subtiles modifications apportées aux panneaux d'arrêt — imperceptibles pour l'œil humain — peuvent amener les réseaux neuronaux à les identifier à tort comme des panneaux de limitation de vitesse.
Les recherches sur l'apprentissage automatique explicable pour les véhicules intelligents sécurisés soulignent que la complexité des réseaux neuronaux engendre des vulnérabilités. À mesure que les véhicules se connectent à des réseaux externes via les communications véhicule-à-tout (V2X), ils deviennent des cibles potentielles pour les cyberattaques.
La sécurisation de ces systèmes nécessite une défense en profondeur : communications cryptées, détection des anomalies et systèmes de sécurité redondants qui ne reposent pas uniquement sur les résultats de l’apprentissage automatique.
Prise de décision éthique
Lorsqu'une collision est inévitable, comment un véhicule autonome doit-il décider de la marche à suivre ? Ces scénarios, comparables au dilemme du tramway, bien que rares, soulèvent des questions fondamentales sur l'éthique de la programmation algorithmique.
Les véhicules doivent-ils privilégier la sécurité des passagers avant tout ? Minimiser les risques ? Se conformer à des règles juridiques strictes ? Les cultures et les individus divergent sur ces questions, or les systèmes autonomes doivent prendre des décisions en une fraction de seconde.
Le projet de norme IEEE sur l'alignement des intentions humaines et de l'intelligence artificielle dans la conduite autonome aborde ces défis, en tentant de créer des cadres pour garantir que le comportement de l'IA soit aligné sur les valeurs et les attentes humaines.
Défis environnementaux
Les modèles d'apprentissage automatique, entraînés principalement sur les routes ensoleillées de Californie, ne sont pas forcément performants lors des blizzards à Boston. La pluie, la neige et le brouillard masquent les capteurs. Le marquage au sol disparaît sous la neige. Les conditions d'éclairage varient considérablement entre le jour et la nuit.
La mise au point de systèmes robustes exige un apprentissage sur des données diversifiées provenant de différentes zones géographiques, conditions météorologiques et schémas de circulation. C'est l'une des raisons pour lesquelles les essais de véhicules autonomes couvrent de multiples climats et environnements.
Applications concrètes et déploiements actuels
Les véhicules autonomes ne sont pas de simples expériences de laboratoire. Ils fonctionnent aujourd'hui dans des environnements rigoureusement contrôlés et leurs capacités ne cessent de s'accroître.
Livraison du dernier kilomètre et navettes
Les navettes autonomes assurent le transport du dernier kilomètre dans des environnements contrôlés tels que les campus universitaires et les parcs d'activités. Ces applications à basse vitesse, dans des contextes prévisibles, réduisent la complexité à gérer pour les ingénieurs.
Ces déploiements permettent aux entreprises d'affiner la géolocalisation, les communications V2X et l'interaction homme-machine sans être confrontées aux aléas de la conduite urbaine. Ils démontrent également leur valeur ajoutée auprès des clients potentiels et contribuent à l'acceptation du public.
Conduite sur autoroute et assistance avancée au conducteur
Les systèmes de conduite automatisée de niveau 2+ — au cœur des recherches de SAE International visant à rendre la conduite automatisée rentable et courante — fournissent une assistance sur autoroute qui maintient les véhicules au centre de leur voie, assure des distances de sécurité et gère les tâches de conduite courantes.
Ces systèmes s'appuient fortement sur l'apprentissage automatique pour la perception et la prise de décision, mais la responsabilité de la conduite reste humaine. Ils représentent l'état actuel de l'automatisation disponible sur le marché pour la plupart des consommateurs.
Opérations urbaines géorepérées
Certaines entreprises exploitent des véhicules entièrement autonomes sans conducteur de sécurité, mais uniquement dans des zones urbaines soigneusement cartographiées et présentant des conditions favorables. Ces déploiements géorepérés permettent à la technologie de mûrir dans des environnements contrôlés avant d'être étendue à des contextes plus complexes.
La pandémie de COVID-19 a impacté les calendriers de développement. En Chine, malgré les difficultés rencontrées par l'ensemble du marché automobile, le segment des véhicules électriques et connectés a affiché une croissance soutenue et a atteint des niveaux de pénétration de marché records pendant cette période. Le développement s'est néanmoins poursuivi et les déploiements ont depuis repris leur croissance.
| Type d'application | Niveau d'automatisation | Principaux défis en matière d'apprentissage automatique | État actuel |
|---|---|---|---|
| Assistance routière | Niveau 2+ | Maintien de voie, régulateur de vitesse adaptatif | Disponible dans le commerce |
| Navettes du dernier kilomètre | Niveau 4 (limité) | Détection d'objets à basse vitesse, planification de trajectoire | Déploiements limités |
| Zone urbaine géorepérée | Niveau 4 | Trafic complexe, prédiction des piétons | programmes pilotes |
| Autonomie totale | Niveau 5 | Tous les scénarios, toutes les conditions | Phase de recherche |
Tendances futures de l'apprentissage automatique pour les véhicules autonomes
Ce domaine continue d'évoluer rapidement. Plusieurs tendances émergentes façonneront la prochaine génération de systèmes de conduite autonome.
Architectures des transformateurs et mécanismes d'attention
Les modèles Transformer, à la base des récentes avancées en traitement automatique du langage naturel, sont désormais adaptés à la conduite autonome. Leur capacité à identifier les caractéristiques pertinentes dans de vastes contextes spatiaux et temporels les rend particulièrement adaptés à la compréhension de situations de trafic complexes.
Ces modèles peuvent traiter simultanément les informations provenant de plusieurs capteurs, apprenant ainsi quelles données sont les plus pertinentes selon les situations de conduite. Ils excellent également dans la prédiction de l'évolution des scènes au fil du temps, une capacité essentielle pour une navigation sûre.
Apprentissage fédéré et confidentialité
Les véhicules autonomes génèrent d'énormes quantités de données, dont une grande partie est potentiellement sensible. L'apprentissage fédéré permet aux véhicules d'améliorer leurs modèles en tirant des enseignements de l'expérience collective sans centraliser les données brutes.
Chaque véhicule est entraîné sur ses propres données locales, puis les mises à jour du modèle sont partagées plutôt que les données elles-mêmes. Cette approche permet de concilier les avantages de l'apprentissage à partir d'expériences diversifiées et la protection de la vie privée des passagers et des piétons.
Apprentissage par renforcement à partir de retours humains
Des chercheurs développent des méthodes permettant aux véhicules autonomes d'apprendre des démonstrations et des retours d'information des conducteurs humains. Plutôt que de programmer explicitement chaque comportement, ces systèmes observent les conducteurs humains et apprennent à imiter les stratégies efficaces.
L'apprentissage par renforcement sécurisé piloté par les contraintes — une recherche publiée dans IEEE Xplore — garantit que les véhicules apprennent des comportements efficaces tout en respectant les limites de sécurité. Le système peut explorer et optimiser, mais dans le cadre de contraintes qui empêchent les actions dangereuses pendant le processus d'apprentissage.
Coordination multi-agents
Lorsque plusieurs véhicules autonomes partagent la route, ils peuvent communiquer et se coordonner, ce qui peut potentiellement améliorer la fluidité du trafic et la sécurité au-delà de ce que des véhicules indépendants pourraient réaliser.
Les modèles d'apprentissage automatique qui prennent en compte les interactions multi-agents peuvent prédire le comportement des autres véhicules autonomes, facilitant ainsi les insertions, les traversées d'intersections et la circulation en convoi sur autoroute. Cela nécessite de nouvelles approches d'entraînement qui modélisent non seulement le comportement individuel des véhicules, mais aussi la dynamique collective.

Réseaux à mémoire augmentée
Les recherches menées à Cornell sur la capacité des véhicules autonomes à “ mémoriser ” leurs expériences passées révèlent une tendance plus générale. Les réseaux neuronaux enrichis de mémoire peuvent stocker et récupérer des informations sur des lieux précis, les schémas de circulation et les stratégies efficaces.
Au lieu de considérer chaque trajet comme un problème indépendant, ces systèmes constituent des bases de connaissances qui améliorent les performances sur les itinéraires familiers tout en restant applicables aux nouvelles zones. Cette approche reflète la manière dont les conducteurs humains acquièrent progressivement une connaissance du terrain.
Développement et validation de modèles d'apprentissage automatique pour les véhicules autonomes de production
Pour faire passer les systèmes d'apprentissage automatique des prototypes de recherche aux véhicules autonomes prêts pour la production, il faut des processus d'ingénierie rigoureux.
Gestion du pipeline de données
Les recherches de SAE International sur l'acquisition et le traitement des données pour les véhicules autonomes soulignent la complexité de la gestion des données d'entraînement à grande échelle. Les organisations doivent collecter, étiqueter, versionner et organiser les ensembles de données tout en maintenant des normes de qualité élevées.
Lorsqu'un modèle présente de mauvaises performances, les ingénieurs doivent remonter à la source des problèmes liés aux données d'entraînement. Le jeu de données manquait-il d'exemples pour un scénario donné ? Les étiquettes étaient-elles incorrectes ? La distribution réelle a-t-elle évolué par rapport aux conditions d'entraînement ?
Une gestion efficace des pipelines de données nécessite des outils permettant de suivre la provenance des données, de mesurer la diversité des ensembles de données et d'identifier les lacunes en matière de couverture.
Transfert de la simulation à la réalité
Les modèles entraînés principalement par simulation doivent pouvoir être transférés avec succès à des applications réelles. Cet écart entre simulation et réalité pose problème car les simulateurs ne peuvent pas reproduire parfaitement tous les aspects des environnements physiques.
Les techniques d'adaptation de domaine permettent aux modèles de généraliser à partir de données d'entraînement synthétiques à des entrées de capteurs réelles. Ces méthodes corrigent les différences d'apparence, de bruit des capteurs et de dynamique physique entre la simulation et la réalité.
Mais la validation exige en fin de compte des essais en conditions réelles. La simulation accélère le développement, mais ne peut remplacer entièrement l'évaluation sur route.
Intégration et tests continus
Le développement logiciel pour véhicules autonomes ne peut suivre les cycles de publication traditionnels. Les systèmes doivent s'améliorer en continu à mesure que les ingénieurs collectent davantage de données, affinent les modèles et corrigent les problèmes.
Les pipelines d'intégration continue testent automatiquement les nouvelles versions de modèles face à une multitude de scénarios, qu'il s'agisse de tests en conditions réelles ou de cas limites simulés. Les régressions sont détectées avant le déploiement et les améliorations sont validées de manière systématique.
Le NIST encourage l'innovation et renforce la confiance dans la conception, le développement, l'utilisation et la gouvernance des systèmes d'intelligence artificielle pour véhicules autonomes. Ses cadres de référence aident les organisations à établir des normes de test qui contribuent à garantir la sécurité des systèmes.
Mises à jour et surveillance en direct
Les véhicules autonomes déployés reçoivent des mises à jour logicielles à distance, ce qui permet aux entreprises de corriger les bugs, d'améliorer les performances et d'ajouter des fonctionnalités sans procéder à des rappels physiques.
Ces mises à jour comportent toutefois des risques. Une mise à jour défectueuse pourrait affecter simultanément toute une flotte. Des stratégies de déploiement rigoureuses permettent de déployer les changements progressivement, en surveillant les indicateurs de performance avant le déploiement complet.
La surveillance continue des systèmes déployés permet de détecter rapidement les problèmes. La détection d'anomalies signale les comportements inhabituels, et les véhicules peuvent rapporter les situations difficiles rencontrées, aidant ainsi les ingénieurs à identifier les axes d'amélioration.
| Phase de développement | Activités clés | Méthodes de validation | Indicateurs de réussite |
|---|---|---|---|
| Collecte de données | Enregistrement, étiquetage et conservation par capteurs | Analyse de la couverture, contrôles de qualité | Diversité des scénarios, précision des étiquettes |
| Formation de modèle | Sélection de l'architecture, optimisation des hyperparamètres | Validation croisée, évaluation de l'ensemble de test | Précision de la perception, erreur de prédiction |
| Tests de simulation | génération de scénarios virtuels | Couverture des cas limites, analyse des modes de défaillance | Taux de réussite, fréquence d'intervention |
| Essais routiers | Les moteurs de validation en situation réelle | Kilomètres par désengagement, interventions du conducteur de sécurité | Pourcentage de fonctionnement autonome |
| Déploiement | Déploiement progressif, surveillance | Suivi des performances de la flotte, analyse des incidents | Indicateurs de sécurité, satisfaction des utilisateurs |
Architectures d'apprentissage automatique spécifiques à la conduite autonome
Différentes architectures de réseaux neuronaux remplissent différentes fonctions dans la pile technologique des véhicules autonomes.
Réseaux de détection d'objets
Des modèles comme YOLO (You Only Look Once) et Faster R-CNN détectent et classifient les objets présents dans les images de caméras. Ces réseaux de neurones convolutifs traitent les images en temps réel, en traçant des cadres de délimitation autour des piétons, des véhicules, des cyclistes et des autres usagers de la route.
Les réseaux de détection modernes ne se contentent pas d'identifier les objets présents ; ils estiment la distance, prédisent le mouvement et évaluent l'incertitude. Ces données supplémentaires permettent aux systèmes de planification en aval de prendre de meilleures décisions.
Segmentation sémantique
Plutôt que de tracer des cadres autour des objets, la segmentation sémantique attribue une étiquette de classe à chaque pixel d'une image : route, trottoir, véhicule, bâtiment, ciel, végétation.
Cette compréhension au niveau du pixel permet aux véhicules autonomes d'appréhender les surfaces praticables, d'identifier les limites des voies et de distinguer les différents types d'obstacles. Les modèles de segmentation détectent également le marquage routier, les passages piétons et autres éléments de la chaussée essentiels à la navigation.
Modèles temporels pour la prédiction
Les véhicules autonomes doivent prédire l'évolution du trafic au cours des prochaines secondes. Les réseaux neuronaux récurrents et les réseaux convolutionnels temporels traitent des séquences d'observations pour prévoir les états futurs.
Ces modèles apprennent que les piétons à proximité des passages piétons sont plus susceptibles de s'engager sur la chaussée, que les véhicules qui ralentissent devant indiquent souvent des embouteillages et que les feux de direction anticipent les changements de voie. Une prédiction précise permet aux systèmes autonomes d'anticiper plutôt que de réagir.
Apprentissage de bout en bout
Certaines approches s'affranchissent des modules explicites de perception et de prédiction, apprenant directement les correspondances entre les entrées des capteurs et les sorties de commande. Les réseaux de bout en bout observent la conduite humaine et apprennent à imiter les comportements efficaces.
Ces systèmes peuvent détecter des schémas subtils que les pipelines conçus manuellement ne repèrent pas. Mais ils sacrifient l'interprétabilité : en cas de problème, le débogage est plus difficile car il n'y a pas de distinction claire entre les erreurs de perception, de prédiction et de planification.
Questions fréquemment posées
Comment les véhicules autonomes utilisent-ils l'apprentissage automatique pour détecter les piétons ?
Les véhicules autonomes utilisent des réseaux neuronaux convolutifs, entraînés sur des millions d'images annotées, pour détecter les piétons sur les flux vidéo des caméras. Ces modèles identifient les silhouettes, les postures et les mouvements humains, même dans des conditions difficiles comme une faible luminosité ou une occlusion partielle. La fusion de capteurs combine les données des caméras avec les informations LiDAR et radar pour confirmer les détections et estimer précisément la position des piétons. Le système suit en continu les piétons détectés et prédit leurs trajectoires probables afin d'éviter les collisions.
Quelle est la différence entre la conduite autonome de niveau 2 et de niveau 4 ?
Les systèmes de niveau 2 offrent des fonctions d'aide à la conduite telles que le régulateur de vitesse adaptatif et le maintien dans la voie, mais la surveillance de l'environnement reste sous la responsabilité humaine et le conducteur doit être prêt à reprendre le contrôle instantanément. Les systèmes de niveau 4 gèrent l'ensemble des tâches de conduite dans des conditions spécifiques – comme les zones urbaines géorepérées ou les autoroutes – sans intervention humaine, même s'ils peuvent demander une reprise en main à l'approche de leurs limites opérationnelles. Les exigences en matière d'apprentissage automatique diffèrent considérablement : les systèmes de niveau 4 nécessitent des capacités de perception, de prédiction et de planification bien plus performantes pour fonctionner en toute sécurité sans assistance humaine.
Combien de tests sont nécessaires avant que les véhicules autonomes puissent fonctionner en toute sécurité ?
Selon les normes industrielles, la vérification et les tests (y compris MCDC) représentent généralement entre 50 et 70 millions de dollars du coût total de développement des logiciels critiques pour la sécurité. Pour les véhicules autonomes, des tests complets nécessitent des millions de kilomètres parcourus en conditions réelles, ainsi que des milliards de kilomètres simulés couvrant les cas limites. Les cadres réglementaires européens exigent des constructeurs qu'ils prouvent le comportement sûr du véhicule avant sa mise en service, plutôt que d'autoriser l'autocertification. Les nouvelles méthodes de tests combinatoires du NIST génèrent 78 millions de scénarios de tests critiques plus distincts que les approches de référence, rendant ainsi une validation approfondie plus accessible.
Les véhicules autonomes peuvent-ils fonctionner dans des conditions météorologiques difficiles ?
Les conditions météorologiques demeurent l'un des principaux défis pour les systèmes d'apprentissage automatique des véhicules autonomes. Les fortes pluies, la neige et le brouillard dégradent les performances des capteurs : la visibilité des caméras est réduite, les signaux LiDAR sont perturbés par les précipitations et le marquage routier disparaît sous la neige. Les systèmes actuels fonctionnent de manière optimale par temps clair et peuvent nécessiter une intervention humaine ou une réduction de leurs capacités opérationnelles en cas de conditions météorologiques extrêmes. Les chercheurs développent des modèles robustes aux aléas climatiques, entraînés sur des données climatiques variées, et explorent des stratégies de fusion de données de capteurs qui tirent parti des atouts respectifs de chaque capteur dans différentes conditions.
Comment les véhicules autonomes apprennent-ils de l'expérience ?
Des chercheurs de Cornell ont mis au point des systèmes permettant aux véhicules autonomes de “ mémoriser ” leurs trajets précédents et de les utiliser pour leurs futures navigations. Les véhicules stockent des informations sur les intersections complexes, les conditions de circulation à différents moments de la journée et les stratégies efficaces pour les itinéraires familiers. Ces systèmes à mémoire augmentée améliorent leurs performances grâce à l'expérience acquise, tout en conservant leur capacité à s'adapter à de nouveaux environnements. Les modèles d'apprentissage automatique sont mis à jour en continu à mesure que les véhicules collectent de nouvelles données ; toutefois, ces mises à jour font l'objet de tests rigoureux avant leur déploiement afin de garantir que les améliorations n'introduisent pas de nouveaux risques.
Qu’est-ce qui empêche les pirates informatiques de tromper les systèmes d’IA des véhicules autonomes ?
Les recherches sur l'apprentissage automatique explicable pour les véhicules intelligents sécurisés identifient plusieurs défenses contre les attaques adverses. La redondance des modalités de capteurs complexifie les attaques : tromper simultanément les caméras et le LiDAR exige des exploits plus sophistiqués. Les systèmes de détection d'anomalies signalent les schémas inhabituels pouvant indiquer des attaques ou des dysfonctionnements de capteurs. Les communications V2X chiffrées empêchent l'usurpation d'identité. Les approches de défense en profondeur garantissent que, même si un système est compromis, les fonctions critiques pour la sécurité bénéficient de protections de secours. Cependant, la sécurisation des réseaux neuronaux complexes contre toutes les attaques possibles demeure un défi de recherche majeur.
Quand les véhicules entièrement autonomes seront-ils largement disponibles ?
Le calendrier du déploiement de l'autonomie complète de niveau 5 — des véhicules capables de gérer tous les scénarios et toutes les conditions — demeure incertain. Les déploiements actuels se concentrent sur les systèmes de niveau 4 opérant dans des zones géorepérées et bénéficiant de conditions favorables. La transition d'une fiabilité de 99,9991 TP3T à une fiabilité de 99,9991 TP3T ou supérieure, nécessaire à un fonctionnement sans supervision dans tous les environnements, s'avère plus complexe que prévu. Les analyses sectorielles indiquent que les déploiements limités de niveau 4 se développeront progressivement d'ici 2030, leur adoption à plus grande échelle dépendant de la résolution des défis techniques restants liés aux cas particuliers, à la robustesse face aux intempéries et à l'approbation réglementaire.
La route à venir
L'apprentissage automatique a transformé les véhicules autonomes, d'un rêve lointain à une réalité en devenir. Les réseaux neuronaux permettent de développer des systèmes de perception rivalisant avec la vision humaine, des modèles de prédiction anticipant le comportement du conducteur et des algorithmes de planification capables de gérer un trafic complexe.
Des défis importants subsistent toutefois. Même les systèmes les plus sophistiqués rencontrent encore des difficultés dans des cas particuliers. Les conditions météorologiques dégradent les performances des capteurs. Les cadres réglementaires peinent à suivre le rythme des progrès technologiques. Enfin, la norme de fiabilité 99,999%, indispensable à la confiance du public, exige de résoudre des problèmes situés aux limites des capacités actuelles d'apprentissage automatique.
La voie à suivre allie innovation technique et validation rigoureuse. Les architectures Transformer et les mécanismes d'attention promettent une meilleure compréhension des scènes. L'apprentissage fédéré permet une amélioration respectueuse de la vie privée grâce à l'expérience collective. L'apprentissage par renforcement sécurisé, intégrant le retour d'information humain, crée des systèmes qui apprennent tout en respectant les limites de sécurité.
Les normes d'essai du NIST, les cadres de sécurité de l'IEEE et les exigences réglementaires en Europe et ailleurs garantissent que les véhicules autonomes répondent à des exigences de sécurité rigoureuses avant leur déploiement à grande échelle. Ces garde-fous peuvent ralentir le développement, mais ils sont essentiels pour concevoir des systèmes dignes de confiance.
Le marché mondial des véhicules autonomes était évalué à environ 1 400 à 80 milliards de dollars en 2020 (selon l’étendue des systèmes de niveau 3 et plus) et a connu une croissance nettement plus rapide que prévu. D’ici 2025, ce marché devrait atteindre environ 1 400 à 300 milliards de dollars, et en 2026, il est estimé entre 1 400 et plus de 250 milliards de dollars. De nombreux analystes anticipent une forte croissance annuelle composée à deux chiffres (30 à 350 milliards de dollars dans les scénarios les plus optimistes).
La technologie des véhicules autonomes progresse, les déploiements s'étendent et les capacités d'apprentissage automatique continuent de s'améliorer.
Pour les ingénieurs travaillant dans ce domaine, les défis sont immenses, mais l'impact potentiel est transformateur. Les véhicules autonomes pourraient réduire le nombre de morts sur les routes, améliorer la mobilité des personnes incapables de conduire et remodeler en profondeur les transports urbains.
Les systèmes d'apprentissage automatique qui rendent possible cette transformation doivent être robustes, sûrs et fiables. Cela exige non seulement des innovations algorithmiques, mais aussi des processus d'ingénierie rigoureux, des tests exhaustifs et des cadres réglementaires qui privilégient la sécurité publique.
L'avenir de la conduite autonome se construit aujourd'hui — un réseau neuronal, un scénario de test et une validation de sécurité à la fois.