Kurzzusammenfassung: Maschinelles Lernen ermöglicht es autonomen Fahrzeugen, ihre Umgebung wahrzunehmen, in Echtzeit Entscheidungen zu treffen und die Sicherheit durch neuronale Netze, Computer Vision und Sensorfusion zu verbessern. Deep-Learning-Modelle verarbeiten Daten von Kameras, LiDAR und Radar, um Objekte zu erkennen, Verhalten vorherzusagen und komplexe Verkehrssituationen zu bewältigen. Teststandards wie MCDC und Rahmenwerke des NIST gewährleisten, dass diese Systeme vor ihrer Inbetriebnahme die Sicherheitsanforderungen erfüllen.
Autonome Fahrzeuge sind keine Science-Fiction mehr. Sie rollen durch die Städte, lernen aus Millionen von Straßenkilometern und verändern die Art und Weise, wie Transport funktioniert.
Im Zentrum dieser Transformation steht maschinelles Lernen. Neuronale Netze, die Fußgänger in Millisekunden erkennen können, Algorithmen, die vorhersagen, was andere Fahrer als Nächstes tun werden, und Systeme, die sich mit jeder Fahrt verbessern.
Der globale Markt für autonome Fahrzeuge wurde 2020 auf rund 50–80 Milliarden US-Dollar geschätzt (abhängig vom Umfang der Systeme ab Level 3) und ist deutlich schneller gewachsen als ursprünglich prognostiziert. Bis 2025 wird ein Marktvolumen von etwa 200–300 Milliarden US-Dollar erwartet, und für 2026 wird ein Volumen von 250–400+ Milliarden US-Dollar prognostiziert. Viele Analysten gehen von einem weiterhin starken zweistelligen durchschnittlichen jährlichen Wachstum (CAGR) aus (30–350+ Milliarden US-Dollar in optimistischen Szenarien).
Dieses explosive Wachstum ist nicht nur auf die Hardware zurückzuführen – es wird durch Fortschritte in der künstlichen Intelligenz angetrieben, die Fahrzeuge intelligenter, sicherer und leistungsfähiger machen.
Aber eines ist klar: Die Entwicklung von Systemen für maschinelles Lernen im Bereich des autonomen Fahrens ist nicht mit der Entwicklung eines Empfehlungssystems oder Chatbots vergleichbar. Wenn ein Algorithmus einen Fehler macht, stehen Menschenleben auf dem Spiel.
Dies stellt uns vor einzigartige Herausforderungen. Wie trainieren Ingenieure neuronale Netze, um Situationen zu bewältigen, die sie noch nie erlebt haben? Welche Teststandards gewährleisten, dass diese Systeme sicher genug für den öffentlichen Straßenverkehr sind? Und wie bringen Regulierungsbehörden Innovation und öffentliche Sicherheit in Einklang?
Wie maschinelles Lernen autonome Fahrzeugsysteme antreibt
Maschinelles Lernen unterstützt autonome Fahrzeuge nicht nur, sondern ermöglicht sie grundlegend. Ohne neuronale Netze, die Sensordaten in Echtzeit verarbeiten, könnten selbstfahrende Autos nicht funktionieren.
Der Technologie-Stack lässt sich in mehrere miteinander verbundene Schichten unterteilen.
Wahrnehmung durch Computer Vision
Computer-Vision-Algorithmen analysieren Kamerabilder, um Objekte zu erkennen, Schilder zu lesen und die Straßenführung zu verstehen. Mit Millionen von beschrifteten Bildern trainierte Convolutional Neural Networks (CNNs) können selbst bei schlechten Lichtverhältnissen zwischen Fußgängern, Radfahrern und Einkaufswagen unterscheiden.
Diese Systeme funktionieren nicht isoliert. Sie führen Daten aus verschiedenen Quellen zusammen: Kameras liefern detailreiche Bilder, LiDAR erstellt präzise 3D-Karten und Radar erkennt Objekte auch bei Nebel und Regen.
Moderne Steuerungssysteme analysieren diese Materialdaten, um Hindernisse und wichtige Orientierungspunkte zu erkennen und die passende Kursrichtung festzulegen. Die Kombination dieser Sensordaten ermöglicht ein umfassendes Verständnis der Fahrzeugumgebung, das deutlich zuverlässiger ist als das, was ein einzelner Sensor leisten könnte.
Neuronale Netze zur Entscheidungsfindung
Wahrnehmung ist nur der erste Schritt. Autonome Fahrzeuge müssen interpretieren, was sie sehen, und entscheiden, wie sie reagieren.
Tiefe neuronale Netze verarbeiten die fusionierten Sensordaten, um vorherzusagen, wie sich Verkehrsszenarien entwickeln werden. Wird ein Fußgänger, der in der Nähe eines Zebrastreifens steht, die Straße betreten? Handelt es sich bei einer plötzlichen Bremsung eines vorausfahrenden Fahrzeugs um einen Notfall oder eine routinemäßige Verkehrsbehinderung?
Forscher der Cornell University unter der Leitung von Kilian Weinberger haben Systeme entwickelt, die es autonomen Fahrzeugen ermöglichen, “Erinnerungen” an frühere Fahrten anzulegen und diese für die zukünftige Navigation zu nutzen. Die Fahrzeuge lernen bekannte Strecken, antizipieren schwierige Kreuzungen und passen ihr Verhalten auf Grundlage vergangener Fahrten an.
Dieses erfahrungsbasierte Lernen ahmt nach, wie menschliche Fahrer im Laufe der Zeit Intuition entwickeln. Doch im Gegensatz zum Menschen lassen sich autonome Systeme niemals ablenken, ermüden oder beeinträchtigen.
Pfadplanung und -steuerung
Sobald das Fahrzeug seine Umgebung erfasst und mögliche zukünftige Ereignisse vorhergesagt hat, muss es eine sichere Route planen. Algorithmen des maschinellen Lernens bewerten Tausende potenzieller Wege in Millisekunden und wählen Routen aus, die Sicherheit, Effizienz und Fahrgastkomfort optimal vereinen.
Diese Planungssysteme müssen physikalische Grenzen berücksichtigen – Fahrzeuge können nicht blitzschnell Kurven fahren oder abrupt anhalten. Sie beziehen auch soziale Konventionen mit ein: Menschen erwarten bestimmtes Fahrverhalten, und autonome Fahrzeuge, die gegen diese Normen verstoßen (selbst wenn sie technisch legal sind), schaffen gefährliche Situationen.
Training von Modellen des maschinellen Lernens für selbstfahrende Autos
Der Aufbau neuronaler Netze, die sich sicher im realen Straßenverkehr bewegen können, erfordert riesige Datenmengen und ausgefeilte Trainingsmethoden.
Die Datenherausforderung
Unternehmen, die autonome Fahrzeuge entwickeln, sammeln Petabytes an Fahrdaten. Kameras, Sensoren und Fahrzeugsysteme zeichnen jede Fahrt auf und erfassen sowohl Routineabläufe als auch Grenzfälle – jene seltenen, gefährlichen Situationen, die die Grenzen von Modellen des maschinellen Lernens auf die Probe stellen.
Der Markt für fahrzeuggenerierte Daten wird laut Branchenanalysen bis 2030 voraussichtlich einen Wert zwischen 1,45 Billionen und 1,75 Billionen US-Dollar erreichen. Dies liegt nicht nur am Datenvolumen, sondern vor allem an dessen Bedeutung für das Training immer leistungsfähigerer Systeme.
Rohdaten allein genügen nicht. Ingenieure müssen sie annotieren: Fußgänger, Fahrzeuge, Fahrbahnmarkierungen, Verkehrszeichen und Tausende weiterer Merkmale in Millionen von Bildern und Sensoraufnahmen. Dieser Annotationsprozess ist zeitaufwändig und kostspielig, aber unerlässlich für überwachtes Lernen.
Simulations- und synthetische Daten
Um autonome Fahrzeuge ausschließlich auf öffentlichen Straßen zu testen, wären Milliarden von Kilometern nötig, um genügend seltene Szenarien abzudecken. Hier kommt die Simulation ins Spiel.
Hochpräzise Simulatoren erzeugen virtuelle Umgebungen, in denen Ingenieure testen können, wie Fahrzeuge auf Situationen reagieren, die im realen Straßenverkehr zu gefährlich oder zu selten sind. Was passiert, wenn ein Fußgänger plötzlich auf die Straße springt? Wie sollte das Fahrzeug auf einen Reifenplatzer bei Autobahngeschwindigkeit reagieren?
Synthetische Daten, die durch Simulationen erzeugt werden, helfen, Lücken in realen Datensätzen zu schließen. Diese simulierten Szenarien liefern Trainingsbeispiele, die man in der Natur erst nach Jahren finden würde.
Deep Learning-Architekturen
Verschiedene Architekturen des maschinellen Lernens dienen unterschiedlichen Zwecken in autonomen Fahrsystemen. Convolutional Neural Networks (CNNs) eignen sich hervorragend für die Bilderkennung und Objekterkennung. Recurrent Neural Networks (RNNs) und Transformer verarbeiten sequentielle Daten und prognostizieren die Entwicklung von Verkehrsszenarien im Zeitverlauf.
End-to-End-Lernansätze, die von Unternehmen wie Drive.ai entwickelt wurden, ordnen Sensoreingaben direkt Steuerungsausgaben zu. Diese Systeme lernen das Fahren, indem sie menschliches Verhalten beobachten und dabei Muster erkennen, die herkömmlichen regelbasierten Systemen möglicherweise entgehen.
Doch hier liegt die Herausforderung: Deep-Learning-Modelle sind oft “Black Boxes”. Wenn ein neuronales Netzwerk eine Entscheidung trifft, können Ingenieure nicht immer erklären, warum. Das ist problematisch bei der Fehlersuche oder beim Nachweis gegenüber Aufsichtsbehörden, dass Systeme sicher sind.
Sicherheitsstandards und Prüfverfahren für autonome Systeme
Sicherheit ist bei autonomen Fahrzeugen keine Option. Sie ist die grundlegende Voraussetzung dafür, dass diese Systeme auf öffentlichen Straßen eingesetzt werden können.
Modifizierte Bedingungs-/Entscheidungsabdeckungsprüfung
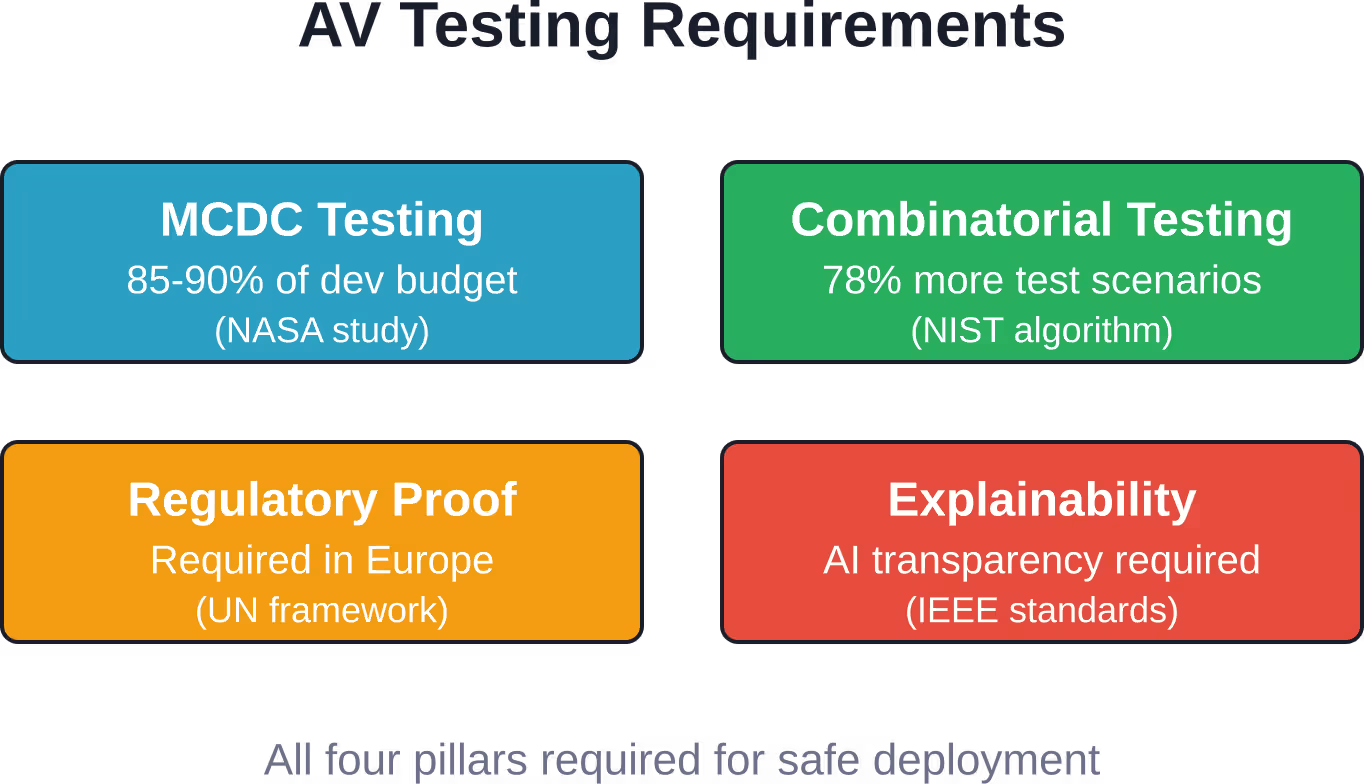
Lebenskritische Software in der Luftfahrt nutzt gemäß NIST-Forschung zu autonomen Systemen die modifizierte Bedingungs-/Entscheidungsabdeckung (MCDC) als Testkriterium. Dieser strenge Standard verlangt, dass jede Entscheidung im Code jedes mögliche Ergebnis berücksichtigt, jede Bedingung innerhalb jeder Entscheidung jedes mögliche Ergebnis berücksichtigt und jede Bedingung unabhängig das Entscheidungsergebnis beeinflusst.
Das Problem? MCDC-Tests sind ressourcenintensiv. Laut NIST-Forschung zu autonomen Systemen ist die wichtigste Testmethode für lebenskritische Software, wie sie beispielsweise in der Luftfahrt eingesetzt wird, die Modified Condition/Decision Coverage (MCDC), die umfassende Tests der Entscheidungsergebnisse erfordert.
Bei autonomen Fahrzeugen mit Millionen von Codezeilen und neuronalen Netzen mit Milliarden von Parametern erweisen sich herkömmliche MCDC-Ansätze als unpraktikabel. Kombinatorische Testmethoden generieren deutlich mehr unterschiedliche kritische Testszenarien als herkömmliche Ansätze und ermöglichen so umfassendere Tests.
Regulierungsrahmen
Verschiedene Regionen verfolgen unterschiedliche Ansätze bei der Regulierung autonomer Fahrzeuge. In Europa verlangen die regulatorischen Rahmenbedingungen im Rahmen des UN-Regimes von den Herstellern den Nachweis der sicheren Fahrweise vor der Inbetriebnahme, im Gegensatz zu einigen US-Bundesstaaten, die eine Selbstzertifizierung zulassen.
Laut Forschern der RWTH Aachen zielen europäische Regulierungsrahmen, die den Nachweis sicheren autonomen Fahrverhaltens gemäß UN-Richtlinien fordern, darauf ab, 99,9991³ Unfälle zu vermeiden, wie sie in weniger strengen Rechtsordnungen vorkommen. Dies steht im Gegensatz zu Ansätzen, die weniger strenge Vorabvalidierungen und weniger restriktive Testverfahren zulassen.
IEEE-Standards wie P3474 befassen sich mit der Abstimmung zwischen menschlichen Absichten und künstlicher Intelligenz beim autonomen Fahren und schaffen Rahmenbedingungen, um sicherzustellen, dass sich KI-Systeme so verhalten, dass sie den menschlichen Erwartungen und Sicherheitsanforderungen entsprechen.
Erklärbarkeit und Transparenz
Wenn ein autonomes Fahrzeug einen Fehler macht, müssen die Ermittler die Ursache verstehen. Dazu sind erklärbare KI-Systeme erforderlich, die Einblick in deren Entscheidungsprozesse ermöglichen.
Die Forschung zur Erprobung autonomer Fahrzeuge unterstreicht die Bedeutung von Nachvollziehbarkeit in KI-Entscheidungsprozessen und -Protokollen für die Bewertung der Robustheit und des ethischen Verhaltens von Vorhersagesystemen. Ohne Transparenz wird es nahezu unmöglich, öffentliches Vertrauen aufzubauen und regulatorische Anforderungen zu erfüllen.
Maschinelle Lernmodelle müssen Leistung und Interpretierbarkeit in Einklang bringen. Manchmal sind einfachere Modelle, die Ingenieure vollständig verstehen können, besser geeignet als geringfügig genauere, aber undurchsichtige Deep-Learning-Systeme.

Autonome Fahrmodelle mit überlegener KI verbessern
Autonome Fahrsysteme benötigen zuverlässige Modelle des maschinellen Lernens, die visuelle, sensorische und umweltbezogene Daten unter wechselnden Bedingungen verarbeiten können. AI Superior unterstützt Teams, die an KI-gesteuerten Systemen für Navigation, Wahrnehmung, Vorhersage und fahrbezogene Automatisierung arbeiten.
AI Superior kann Teams für autonomes Fahren unterstützen bei:
- Überprüfung von Fahr-, Sensor- und Verkehrsdatensätzen
- Definition des Anwendungsfalls für maschinelles Lernen beim autonomen Fahren
- Entwicklung von Machbarkeitsstudiensystemen
- Entwicklung von Computer-Vision- und Vorhersagemodellen
- Leistungsfähigkeit und Zuverlässigkeit des Testmodells
- Planungsintegration in Fahrzeugsoftwareumgebungen
- Unterstützung der Bereitstellung und Modellverfeinerung
Für autonomes Fahren können dies Spurerkennung, Objekterkennung, Fahrszenenanalyse, Trajektorienvorhersage, Verkehrsverhaltensanalyse und navigationsbezogene KI-Systeme umfassen.
Wenden Sie sich an AI Superior. um die Projektrichtung zu besprechen.
Herausforderungen für maschinelles Lernen beim autonomen Fahren
Trotz bemerkenswerter Fortschritte bestehen weiterhin erhebliche Hindernisse, bevor vollständig autonome Fahrzeuge zum Alltag gehören.
Grenzfälle und Long-Tail-Szenarien
Maschinelle Lernmodelle sind in alltäglichen Szenarien, die sie im Training tausendfach gesehen haben, hervorragend. Doch das Autofahren birgt eine unendliche Vielfalt an ungewöhnlichen Situationen: Baustellen mit verwirrender Fahrbahnmarkierung, Handzeichen von Polizisten zur Verkehrsregelung, Gegenstände, die von Lkw vor einem fallen.
Diese Grenzfälle – einzeln selten, aber in ihrer Gesamtheit unvermeidlich – stellen die größte Herausforderung dar. Selbst ein neuronales Netzwerk, das in 99,991³T Fällen fehlerfrei arbeitet, gerät regelmäßig in gefährliche Situationen, wenn es über Stunden hinweg mehrmals pro Sekunde Entscheidungen verarbeitet.
Mal ehrlich: Auch umfangreiche Tests können nicht garantieren, dass ein System jedes erdenkliche Szenario durchlaufen hat. Ingenieure müssen Modelle entwickeln, die sich gut auf neue Situationen übertragen lassen, Unsicherheiten erkennen und konservativ reagieren.
Angriffe von Gegnern und Sicherheit
Maschinelle Lernmodelle können getäuscht werden. Forscher haben gezeigt, dass subtile Veränderungen an Stoppschildern – für Menschen nicht wahrnehmbar – dazu führen können, dass neuronale Netze diese fälschlicherweise als Geschwindigkeitsbegrenzungsschilder einstufen.
Die Forschung zu erklärbarem maschinellem Lernen für sichere intelligente Fahrzeuge unterstreicht, dass die Komplexität neuronaler Netze Schwachstellen schafft. Da Fahrzeuge über die Fahrzeug-zu-Allem-Kommunikation (V2X) mit externen Netzwerken verbunden werden, werden sie zu potenziellen Zielen für Cyberangriffe.
Die Sicherung dieser Systeme erfordert eine mehrschichtige Verteidigung: verschlüsselte Kommunikation, Anomalieerkennung und redundante Sicherheitssysteme, die nicht ausschließlich auf den Ergebnissen des maschinellen Lernens basieren.
Ethische Entscheidungsfindung
Wenn ein Zusammenstoß unvermeidbar ist, wie soll ein autonomes Fahrzeug dann entscheiden, was zu tun ist? Diese Trolley-Problem-Szenarien – so selten sie auch sein mögen – werfen grundlegende Fragen zur Programmierung von Ethik in Algorithmen auf.
Soll bei Fahrzeugen die Sicherheit der Insassen oberste Priorität haben? Soll der Gesamtschaden minimiert werden? Sollen starre gesetzliche Vorschriften befolgt werden? Verschiedene Kulturen und Individuen sind sich bei diesen Fragen uneinig, doch autonome Systeme müssen in Sekundenbruchteilen Entscheidungen treffen.
Der IEEE-Normenentwurf zur Abstimmung menschlicher Absichten und künstlicher Intelligenz beim autonomen Fahren befasst sich mit diesen Herausforderungen und versucht, Rahmenbedingungen zu schaffen, die sicherstellen, dass das Verhalten der KI mit menschlichen Werten und Erwartungen übereinstimmt.
Umweltprobleme
Maschinelle Lernmodelle, die hauptsächlich auf sonnigen Straßen in Kalifornien trainiert wurden, funktionieren in Bostoner Schneestürmen nicht unbedingt gut. Sensoren werden durch Regen, Schnee und Nebel beeinträchtigt. Fahrbahnmarkierungen verschwinden unter der Schneedecke. Die Lichtverhältnisse ändern sich zwischen Tag und Nacht drastisch.
Der Aufbau robuster Systeme erfordert das Training mit vielfältigen Daten aus unterschiedlichen geografischen Regionen, unter verschiedenen Wetterbedingungen und mit unterschiedlichen Verkehrsmustern. Das ist einer der Gründe, warum Tests autonomer Fahrzeuge in verschiedenen Klimazonen und Umgebungen durchgeführt werden.
Anwendungen in der Praxis und aktuelle Implementierungen
Autonome Fahrzeuge sind nicht nur Laborexperimente. Sie operieren heute in sorgfältig kontrollierten Umgebungen, und ihre Fähigkeiten erweitern sich stetig.
Zustellung auf der letzten Meile und Shuttle-Services
Autonome Pods dienen als Shuttles für die letzte Meile in kontrollierten Umgebungen wie Campusgeländen und Gewerbegebieten. Diese Anwendungen mit niedriger Geschwindigkeit in vorhersehbaren Umgebungen reduzieren die Komplexität, mit der Ingenieure umgehen müssen.
Diese Implementierungen ermöglichen es Unternehmen, Lokalisierung, V2X-Kommunikation und Mensch-Maschine-Interaktion zu optimieren, ohne sich dem vollen Chaos des städtischen Verkehrs aussetzen zu müssen. Sie demonstrieren zudem den Nutzen für potenzielle Kunden und tragen zur Akzeptanz in der Öffentlichkeit bei.
Autobahnfahren und erweiterte Fahrerassistenzsysteme
Automatisierte Fahrsysteme der Stufe 2+ – der Schwerpunkt der Forschung von SAE International zur Rentabilität und Verbreitung des automatisierten Fahrens – bieten Unterstützung auf Autobahnen, indem sie Fahrzeuge in der Mitte der Fahrspur halten, sichere Abstände gewährleisten und routinemäßige Fahraufgaben übernehmen.
Diese Systeme nutzen maschinelles Lernen für Wahrnehmung und Entscheidungsfindung, die Verantwortung für das Fahren selbst bleibt jedoch beim Menschen. Sie repräsentieren den aktuellen Stand der kommerziell verfügbaren Automatisierung für die meisten Verbraucher.
Geofencing-basierte städtische Operationen
Einige Unternehmen betreiben vollautonome Fahrzeuge ohne menschliche Sicherheitsfahrer – allerdings nur in sorgfältig kartierten Stadtgebieten mit günstigen Bedingungen. Diese geofenced Einsätze ermöglichen es der Technologie, sich in kontrollierten Umgebungen weiterzuentwickeln, bevor sie in anspruchsvollere Umgebungen eingeführt wird.
Die COVID-19-Pandemie beeinträchtigte die Entwicklungszeitpläne. In China stand der gesamte Automobilmarkt vor Herausforderungen, doch das Segment der Elektro- und vernetzten Fahrzeuge verzeichnete ein robustes Wachstum und erreichte während der Pandemie eine Rekordmarktdurchdringung. Die Entwicklung wurde jedoch fortgesetzt, und die Auslieferungen haben seitdem wieder zugenommen.
| Anwendungsart | Automatisierungsgrad | Wichtigste Herausforderungen im Bereich des maschinellen Lernens | Aktueller Status |
|---|---|---|---|
| Autobahnhilfe | Stufe 2+ | Spurhalteassistent, adaptive Geschwindigkeitsregelung | Im Handel erhältlich |
| Last-Mile-Shuttles | Stufe 4 (eingeschränkt) | Objekterkennung bei niedrigen Geschwindigkeiten, Pfadplanung | Begrenzte Einsätze |
| Geofenced Urban | Stufe 4 | Komplexer Verkehr, Fußgängerprognose | Pilotprogramme |
| Volle Autonomie | Stufe 5 | Alle Szenarien, alle Bedingungen | Forschungsphase |
Zukunftstrends im maschinellen Lernen für autonome Fahrzeuge
Das Gebiet entwickelt sich weiterhin rasant. Mehrere neue Trends werden die nächste Generation autonomer Fahrsysteme prägen.
Transformatorarchitekturen und Aufmerksamkeitsmechanismen
Transformer-Modelle – die Architektur hinter den jüngsten Durchbrüchen in der Verarbeitung natürlicher Sprache – werden nun für das autonome Fahren adaptiert. Ihre Fähigkeit, relevante Merkmale in großen räumlichen und zeitlichen Kontexten zu berücksichtigen, macht sie gut geeignet, um komplexe Verkehrsszenarien zu verstehen.
Diese Modelle können Informationen von mehreren Sensoren gleichzeitig verarbeiten und lernen, welche Eingangsgrößen für verschiedene Fahrsituationen am wichtigsten sind. Sie zeichnen sich außerdem durch ihre Fähigkeit aus, die Entwicklung von Szenen im Zeitverlauf vorherzusagen – eine entscheidende Fähigkeit für sicheres Navigieren.
Föderiertes Lernen und Datenschutz
Autonome Fahrzeuge erzeugen riesige Datenmengen, von denen viele potenziell sensibel sind. Föderiertes Lernen ermöglicht es Fahrzeugen, ihre Modelle durch das Lernen aus kollektiven Erfahrungen zu verbessern, ohne die Rohdaten zentral zu speichern.
Die einzelnen Fahrzeuge trainieren mit ihren lokalen Daten und teilen anschließend Modellaktualisierungen anstatt der Daten selbst. Dieser Ansatz vereint die Vorteile des Lernens aus vielfältigen Erfahrungen mit dem Schutz der Privatsphäre von Fahrgästen und Fußgängern.
Verstärkendes Lernen durch menschliches Feedback
Forscher entwickeln Methoden, mit denen autonome Fahrzeuge aus menschlichen Vorführungen und Rückmeldungen lernen können. Anstatt jedes Verhalten explizit zu programmieren, beobachten diese Systeme menschliche Fahrer und lernen, erfolgreiche Strategien nachzuahmen.
Constraint-gesteuertes sicheres Reinforcement Learning – eine in IEEE Xplore veröffentlichte Studie – gewährleistet, dass Fahrzeuge effektive Verhaltensweisen erlernen und dabei Sicherheitsgrenzen einhalten. Das System kann erkunden und optimieren, jedoch innerhalb von Beschränkungen, die gefährliche Aktionen während des Lernprozesses verhindern.
Multiagentenkoordination
Wenn mehrere autonome Fahrzeuge die Straße teilen, können sie miteinander kommunizieren und sich abstimmen – wodurch der Verkehrsfluss und die Sicherheit potenziell besser verbessert werden als mit einzelnen Fahrzeugen.
Maschinelle Lernmodelle, die die Interaktionen mehrerer Agenten berücksichtigen, können das Verhalten anderer autonomer Fahrzeuge vorhersagen und so ein reibungsloseres Einfädeln, Überqueren von Kreuzungen und das Fahren im Konvoi auf Autobahnen ermöglichen. Dies erfordert neue Trainingsansätze, die nicht nur das Verhalten einzelner Fahrzeuge, sondern auch die kollektive Dynamik modellieren.

Speichererweiterte Netzwerke
Die Forschung von Cornell zu autonomen Fahrzeugen, die “Erinnerungen” an frühere Erfahrungen anlegen, deutet auf einen umfassenderen Trend hin. Mit Gedächtnis erweiterter neuronaler Netz kann Informationen über bestimmte Orte, Verkehrsmuster und erfolgreiche Strategien speichern und abrufen.
Anstatt jede Fahrt als unabhängiges Problem zu behandeln, bauen diese Systeme Wissensdatenbanken auf, die die Leistung auf bekannten Strecken verbessern und sich gleichzeitig auf neue Gebiete übertragen lassen. Dieser Ansatz spiegelt wider, wie menschliche Fahrer im Laufe der Zeit Ortskenntnisse erwerben.
Entwicklung und Validierung von ML-Modellen für produktionsreife autonome Fahrzeuge
Die Entwicklung von maschinellen Lernsystemen von Forschungsprototypen hin zu serienreifen autonomen Fahrzeugen erfordert strenge technische Prozesse.
Datenpipeline-Verwaltung
Die Forschung von SAE International zur Datenerfassung und -verarbeitung für autonome Fahrzeuge unterstreicht die Komplexität der Verwaltung von Trainingsdaten in großem Umfang. Organisationen müssen Datensätze sammeln, kennzeichnen, versionieren und pflegen und dabei Qualitätsstandards einhalten.
Wenn ein Modell schlecht funktioniert, müssen Ingenieure die Fehler auf Probleme mit den Trainingsdaten zurückführen. Fehlten im Datensatz Beispiele für ein bestimmtes Szenario? Waren die Bezeichnungen falsch? Hat sich die Verteilung in der realen Welt gegenüber den Trainingsbedingungen verändert?
Für ein effektives Datenpipeline-Management werden Werkzeuge benötigt, mit denen sich die Datenherkunft nachverfolgen, die Diversität der Datensätze messen und Lücken in der Abdeckung identifizieren lassen.
Übertragung von der Simulation in die Realität
Modelle, die primär in Simulationen trainiert wurden, müssen erfolgreich in die reale Anwendung übertragen werden. Diese Diskrepanz zwischen Simulation und Realität stellt eine Herausforderung dar, da Simulatoren nicht jeden Aspekt physikalischer Umgebungen perfekt nachbilden können.
Domänenadaptionsverfahren helfen Modellen, von synthetischen Trainingsdaten auf reale Sensoreingaben zu generalisieren. Diese Methoden gleichen Unterschiede im Erscheinungsbild, im Sensorauschen und in der physikalischen Dynamik zwischen Simulation und Realität aus.
Die Validierung erfordert jedoch letztendlich Tests unter realen Bedingungen. Simulationen beschleunigen zwar die Entwicklung, können aber die Erprobung im Straßenverkehr nicht vollständig ersetzen.
Kontinuierliche Integration und Tests
Die Softwareentwicklung für autonome Fahrzeuge kann nicht den traditionellen Releasezyklen folgen. Die Systeme müssen sich kontinuierlich verbessern, da die Ingenieure mehr Daten sammeln, Modelle verfeinern und Fehler beheben.
Kontinuierliche Integrationspipelines testen neue Modellversionen automatisch anhand einer Vielzahl von Szenarien – sowohl realer Testläufe als auch simulierter Grenzfälle. Regressionen werden vor der Bereitstellung erkannt und Verbesserungen systematisch validiert.
Das NIST fördert Innovation und stärkt das Vertrauen in die Entwicklung, den Einsatz und die Steuerung von Systemen künstlicher Intelligenz für autonome Fahrzeuge. Seine Rahmenwerke unterstützen Organisationen bei der Festlegung von Teststandards, die das Vertrauen in die Systemsicherheit stärken.
Over-the-Air-Updates und Überwachung
Im Einsatz befindliche autonome Fahrzeuge erhalten Software-Updates per Fernzugriff, sodass Unternehmen Fehler beheben, die Leistung verbessern und Funktionen hinzufügen können, ohne physische Rückrufe durchführen zu müssen.
Diese Aktualisierungen bergen jedoch Risiken. Ein fehlerhaftes Update könnte eine ganze Flotte gleichzeitig beeinträchtigen. Sorgfältige Einführungsstrategien implementieren Änderungen daher schrittweise und überwachen die Leistungskennzahlen vor der vollständigen Implementierung.
Die kontinuierliche Überwachung der eingesetzten Systeme hilft, Probleme frühzeitig zu erkennen. Die Anomalieerkennung kennzeichnet ungewöhnliche Verhaltensweisen, und Fahrzeuge können Szenarien melden, in denen sie Schwierigkeiten hatten, wodurch Ingenieure Verbesserungspotenziale identifizieren können.
| Entwicklungsphase | Wichtigste Aktivitäten | Validierungsmethoden | Erfolgskennzahlen |
|---|---|---|---|
| Datensammlung | Sensoraufzeichnung, Beschriftung, Kuratierung | Abdeckungsanalyse, Qualitätsprüfungen | Szenariovielfalt, Genauigkeit der Beschriftung |
| Modelltraining | Architekturauswahl, Hyperparameter-Optimierung | Kreuzvalidierung, Auswertung des Testdatensatzes | Wahrnehmungsgenauigkeit, Vorhersagefehler |
| Simulationstests | Generierung virtueller Szenarien | Abdeckung von Grenzfällen, Fehlermodusanalyse | Erfolgsquote, Interventionshäufigkeit |
| Straßentests | Validierung in der Praxis | Kilometer pro Ausstieg, Sicherheitseingriffe des Fahrers | Autonomer Betriebsanteil |
| Einsatz | Schrittweise Einführung, Überwachung | Flottenleistungsverfolgung, Vorfallanalyse | Sicherheitskennzahlen, Nutzerzufriedenheit |
Architekturen für maschinelles Lernen speziell für autonomes Fahren
Unterschiedliche neuronale Netzwerkarchitekturen erfüllen unterschiedliche Funktionen im System autonomer Fahrzeuge.
Objekterkennungsnetzwerke
Modelle wie YOLO (You Only Look Once) und Faster R-CNN erkennen und klassifizieren Objekte in Kamerabildern. Diese Faltungsnetzwerke verarbeiten Bilder in Echtzeit und zeichnen Begrenzungsrahmen um Fußgänger, Fahrzeuge, Radfahrer und andere Verkehrsteilnehmer.
Moderne Detektionsnetzwerke identifizieren nicht nur vorhandene Objekte, sondern schätzen auch Entfernungen, prognostizieren Bewegungen und bewerten Unsicherheiten. Diese zusätzlichen Ergebnisse helfen nachgelagerten Planungssystemen, bessere Entscheidungen zu treffen.
Semantische Segmentierung
Anstatt Objekte mit Kästchen zu umranden, ordnet die semantische Segmentierung jedem Pixel in einem Bild eine Klassenbezeichnung zu: Straße, Gehweg, Fahrzeug, Gebäude, Himmel, Vegetation.
Dieses pixelgenaue Verständnis hilft autonomen Fahrzeugen, befahrbare Oberflächen zu erkennen, Fahrbahnbegrenzungen zu identifizieren und verschiedene Arten von Hindernissen zu unterscheiden. Segmentierungsmodelle erkennen zudem Fahrbahnmarkierungen, Zebrastreifen und andere für die Navigation wichtige Merkmale der Fahrbahn.
Zeitliche Modelle für Vorhersagen
Autonome Fahrzeuge müssen vorhersagen, wie sich Verkehrsszenarien in den nächsten Sekunden entwickeln werden. Rekurrente neuronale Netze und temporale Faltungsnetze verarbeiten Sequenzen von Beobachtungen, um zukünftige Zustände vorherzusagen.
Diese Modelle lernen, dass Fußgänger in der Nähe von Zebrastreifen eher die Straße betreten, dass abbremsende Fahrzeuge oft auf Stau hinweisen und dass Blinker Spurwechsel ankündigen. Genaue Vorhersagen ermöglichen es autonomen Systemen, proaktiv statt reaktiv zu planen.
End-to-End-Lernen
Einige Ansätze verzichten auf explizite Wahrnehmungs- und Vorhersagemodule und lernen stattdessen direkte Zuordnungen von Sensoreingaben zu Steuerungsausgaben. End-to-End-Netzwerke beobachten das menschliche Fahrverhalten und lernen, erfolgreiche Verhaltensweisen zu imitieren.
Diese Systeme können subtile Muster erkennen, die manuell entwickelten Prozessen entgehen. Allerdings geht dabei die Interpretierbarkeit verloren – wenn etwas schiefgeht, wird die Fehlersuche schwieriger, da sich Wahrnehmungs-, Vorhersage- und Planungsfehler nicht klar voneinander trennen lassen.
Häufig gestellte Fragen
Wie nutzen autonome Fahrzeuge maschinelles Lernen zur Fußgängererkennung?
Autonome Fahrzeuge nutzen Convolutional Neural Networks (CNNs), die mit Millionen von annotierten Bildern trainiert wurden, um Fußgänger in Kamerabildern zu erkennen. Diese Modelle identifizieren menschliche Formen, Körperhaltungen und Bewegungsmuster selbst unter schwierigen Bedingungen wie schlechten Lichtverhältnissen oder teilweiser Verdeckung. Die Sensordatenfusion kombiniert Kameradaten mit LiDAR- und Radardaten, um die Erkennungen zu bestätigen und die Positionen der Fußgänger präzise zu bestimmen. Das System verfolgt die erkannten Fußgänger kontinuierlich und prognostiziert ihre wahrscheinlichen Wege, um Kollisionen zu vermeiden.
Worin besteht der Unterschied zwischen autonomem Fahren der Stufe 2 und der Stufe 4?
Systeme der Stufe 2 bieten Fahrerassistenzfunktionen wie adaptive Geschwindigkeitsregelung und Spurhalteassistent. Der Fahrer bleibt jedoch für die Überwachung der Umgebung verantwortlich und muss jederzeit bereit sein, die Kontrolle zu übernehmen. Systeme der Stufe 4 übernehmen innerhalb bestimmter Bedingungen – wie beispielsweise in abgegrenzten Stadtgebieten oder auf Autobahnen – alle Fahraufgaben ohne menschliches Eingreifen. Sie können jedoch beim Erreichen ihrer Einsatzgrenzen eine Übergabe anfordern. Die Anforderungen an das maschinelle Lernen unterscheiden sich erheblich: Systeme der Stufe 4 benötigen deutlich robustere Wahrnehmungs-, Vorhersage- und Planungsfähigkeiten, um sicher ohne menschliche Unterstützung zu arbeiten.
Wie viele Tests sind erforderlich, bevor autonome Fahrzeuge sicher betrieben werden können?
Branchenübliche Benchmarks zeigen, dass Verifizierung und Tests (einschließlich MCDC) typischerweise 501 bis 701 Tausend Pfund der gesamten Entwicklungskosten für sicherheitskritische Software ausmachen. Für autonome Fahrzeuge erfordert ein umfassendes Testen Millionen von Kilometern realer Fahrten sowie Milliarden von simulierten Kilometern, die Grenzfälle abdecken. Europäische Regulierungsrahmen verlangen von Herstellern den Nachweis der sicheren Funktion vor der Markteinführung und erlauben keine Selbstzertifizierung. Neue kombinatorische Testmethoden des NIST generieren 781 Tausend Pfund mehr unterschiedliche kritische Testszenarien als herkömmliche Ansätze und ermöglichen so eine gründliche Validierung.
Können autonome Fahrzeuge mit schlechten Wetterbedingungen zurechtkommen?
Wetterbedingungen stellen nach wie vor eine der größten Herausforderungen für maschinelle Lernsysteme autonomer Fahrzeuge dar. Starkregen, Schnee und Nebel beeinträchtigen die Sensorleistung: Kameras verlieren an Sicht, LiDAR-Messwerte werden durch Niederschlag gestreut und Fahrbahnmarkierungen verschwinden unter einer Schneedecke. Aktuelle Systeme arbeiten am besten bei klarem Wetter und können bei extremen Bedingungen eine menschliche Intervention erfordern oder ihre Einsatzfähigkeit einschränken. Forscher entwickeln wetterrobuste Modelle, die mit vielfältigen Klimadaten trainiert werden, und erforschen Strategien zur Sensorfusion, die die jeweiligen Stärken der einzelnen Sensoren unter verschiedenen Bedingungen optimal nutzen.
Wie lernen autonome Fahrzeuge aus Erfahrung?
Forscher der Cornell University haben Systeme entwickelt, die es autonomen Fahrzeugen ermöglichen, “Erinnerungen” an frühere Fahrten anzulegen und diese für die zukünftige Navigation zu nutzen. Die Fahrzeuge speichern Informationen über schwierige Kreuzungen, Verkehrsmuster zu verschiedenen Tageszeiten und bewährte Strategien für bekannte Strecken. Diese speichererweiterten Systeme verbessern ihre Leistung durch Erfahrungswerte und behalten gleichzeitig die Fähigkeit, sich in neuen Umgebungen zurechtzufinden. Die Modelle des maschinellen Lernens werden kontinuierlich aktualisiert, sobald die Fahrzeuge mehr Daten sammeln. Die Aktualisierungen werden jedoch vor der Bereitstellung strengen Tests unterzogen, um sicherzustellen, dass die Verbesserungen keine neuen Risiken mit sich bringen.
Was hindert Hacker daran, die KI-Systeme autonomer Fahrzeuge auszutricksen?
Die Forschung zu erklärbarem maschinellem Lernen für sichere intelligente Fahrzeuge identifiziert mehrere Verteidigungsmechanismen gegen Angriffe. Redundante Sensormodalitäten erschweren Angriffe – die gleichzeitige Täuschung von Kameras und LiDAR erfordert komplexere Exploits. Anomalieerkennungssysteme kennzeichnen ungewöhnliche Muster, die auf Angriffe oder Sensorfehlfunktionen hindeuten könnten. Verschlüsselte V2X-Kommunikation verhindert Nachrichtenmanipulation. Mehrstufige Sicherheitskonzepte gewährleisten, dass sicherheitskritische Funktionen auch bei Kompromittierung eines Systems durch Backups geschützt sind. Die Absicherung komplexer neuronaler Netze gegen alle möglichen Angriffe bleibt jedoch eine aktive Forschungsherausforderung.
Wann werden vollautonome Fahrzeuge flächendeckend verfügbar sein?
Der Zeitplan für die vollständige Autonomie der Stufe 5 – Fahrzeuge, die alle Szenarien unter allen Bedingungen bewältigen können – ist weiterhin ungewiss. Aktuelle Implementierungen konzentrieren sich auf Systeme der Stufe 4, die in abgegrenzten Bereichen mit günstigen Bedingungen operieren. Der Übergang von einer Zuverlässigkeit von 991 TP3T zu der für den unbeaufsichtigten Betrieb in allen Umgebungen erforderlichen Zuverlässigkeit von 99,9991 TP3T oder besser erweist sich als schwieriger als ursprünglich prognostiziert. Branchenanalysen deuten darauf hin, dass die begrenzten Implementierungen von Stufe 4 bis 2030 schrittweise ausgeweitet werden, wobei eine breitere Akzeptanz von der Lösung verbleibender technischer Herausforderungen in Bezug auf Grenzfälle, Wetterrobustheit und behördliche Genehmigungen abhängt.
Der Weg vor uns
Maschinelles Lernen hat autonome Fahrzeuge von einer fernen Vision in eine sich entwickelnde Realität verwandelt. Neuronale Netze ermöglichen Wahrnehmungssysteme, die mit dem menschlichen Sehvermögen konkurrieren können, Vorhersagemodelle, die das Fahrverhalten antizipieren, und Planungsalgorithmen, die komplexe Verkehrssituationen bewältigen.
Doch es bestehen weiterhin erhebliche Herausforderungen. Grenzfälle stellen selbst die ausgefeiltesten Systeme vor Probleme. Witterungseinflüsse beeinträchtigen die Sensorleistung. Regulatorische Rahmenbedingungen können mit den technologischen Entwicklungen kaum Schritt halten. Und der für das öffentliche Vertrauen notwendige Zuverlässigkeitsstandard von 99,999% erfordert die Lösung von Problemen an den Grenzen der aktuellen Möglichkeiten des maschinellen Lernens.
Der Weg in die Zukunft verbindet technische Innovation mit strenger Validierung. Transformer-Architekturen und Aufmerksamkeitsmechanismen versprechen ein besseres Szenenverständnis. Föderiertes Lernen ermöglicht datenschutzkonforme Verbesserungen durch kollektive Erfahrung. Sicheres Reinforcement Learning mit menschlichem Feedback schafft Systeme, die unter Einhaltung von Sicherheitsgrenzen lernen.
Prüfstandards des NIST, Sicherheitsrahmen des IEEE und regulatorische Anforderungen in Europa und anderen Ländern gewährleisten, dass autonome Fahrzeuge strenge Sicherheitsanforderungen erfüllen, bevor sie flächendeckend eingesetzt werden. Diese Leitlinien mögen die Entwicklung verlangsamen, sind aber unerlässlich für die Entwicklung von Systemen, denen die Menschen vertrauen können.
Der globale Markt für autonome Fahrzeuge wurde 2020 auf rund 50–80 Milliarden US-Dollar geschätzt (abhängig vom Umfang der Systeme ab Level 3) und ist deutlich schneller gewachsen als ursprünglich prognostiziert. Bis 2025 wird ein Marktvolumen von etwa 200–300 Milliarden US-Dollar erwartet, und für 2026 wird ein Volumen von 250–400+ Milliarden US-Dollar prognostiziert. Viele Analysten gehen von einem weiterhin starken zweistelligen durchschnittlichen jährlichen Wachstum (CAGR) aus (30–350+ Milliarden US-Dollar in optimistischen Szenarien).
Die Technologie autonomer Fahrzeuge schreitet voran, ihre Einsatzgebiete weiten sich aus und die Fähigkeiten des maschinellen Lernens verbessern sich stetig.
Für Ingenieure in diesem Bereich sind die Herausforderungen immens, doch das Potenzial ist bahnbrechend. Autonome Fahrzeuge könnten die Zahl der Verkehrstoten reduzieren, die Mobilität von Menschen mit eingeschränkter Fahrtauglichkeit verbessern und den städtischen Verkehr grundlegend verändern.
Die maschinellen Lernsysteme, die diesen Wandel ermöglichen, müssen robust, sicher und vertrauenswürdig sein. Dies erfordert nicht nur algorithmische Innovationen, sondern auch strenge Entwicklungsprozesse, umfassende Tests und regulatorische Rahmenbedingungen, die der öffentlichen Sicherheit Priorität einräumen.
Die Zukunft des autonomen Fahrens wird heute gestaltet – Schritt für Schritt mit jedem neuronalen Netzwerk, jedem Testszenario und jeder Sicherheitsvalidierung.