Quick Summary: Machine learning enables autonomous vehicles to perceive their environment, make real-time decisions, and improve safety through neural networks, computer vision, and sensor fusion. Deep learning models process data from cameras, LiDAR, and radar to detect objects, predict behavior, and navigate complex traffic scenarios. Testing standards like MCDC and frameworks from NIST ensure these systems meet safety requirements before deployment.
Autonomous vehicles aren’t science fiction anymore. They’re rolling through cities, learning from millions of road miles, and reshaping how transportation works.
At the heart of this transformation? Machine learning. Neural networks that can spot pedestrians in milliseconds, algorithms that predict what other drivers will do next, and systems that improve with every trip.
The global autonomous vehicle market was valued at around $50–80 billion in 2020 (depending on the scope of Level 3+ systems) and has grown significantly faster than early forecasts predicted. By 2025 the market reached approximately $200–300 billion, and in 2026 it is estimated at $250–400+ billion, with many analysts projecting continued strong double-digit CAGR (30–35%+ in optimistic scenarios).
That explosive growth isn’t just about hardware—it’s powered by advances in artificial intelligence that make vehicles smarter, safer, and more capable.
But here’s the thing: building machine learning systems for autonomous driving isn’t like developing a recommendation engine or chatbot. When an algorithm makes a mistake, people’s lives are on the line.
This creates unique challenges. How do engineers train neural networks to handle situations they’ve never seen? What testing standards ensure these systems are safe enough for public roads? And how do regulators balance innovation with public safety?
How Machine Learning Powers Autonomous Vehicle Systems
Machine learning doesn’t just assist autonomous vehicles—it fundamentally enables them. Without neural networks processing sensor data in real-time, self-driving cars couldn’t function.
The technology stack breaks down into several interconnected layers.
Perception Through Computer Vision
Computer vision algorithms analyze camera feeds to identify objects, read signs, and understand road geometry. Convolutional neural networks trained on millions of labeled images can distinguish between a pedestrian, cyclist, and shopping cart—even in poor lighting conditions.
These systems don’t work in isolation. They fuse data from multiple sources: cameras provide rich visual detail, LiDAR creates precise 3D maps, and radar detects objects through fog and rain.
Advanced control systems decode this material data to identify roadblocks and key markers, determining appropriate course headings. The fusion of these sensor inputs creates a comprehensive understanding of the vehicle’s surroundings that’s more robust than any single sensor could provide.
Decision-Making Neural Networks
Perception is only the first step. Autonomous vehicles must interpret what they see and decide how to respond.
Deep neural networks process the fused sensor data to predict how traffic scenarios will unfold. If a pedestrian stands near a crosswalk, will they step into the road? When a car ahead brakes suddenly, is it an emergency or routine traffic slowdown?
Cornell researchers led by Kilian Weinberger have developed systems that allow autonomous vehicles to create “memories” of previous experiences and use them in future navigation. These vehicles learn familiar routes, anticipating challenging intersections and adapting their behavior based on past traversals.
This experience-based learning mimics how human drivers develop intuition over time. But unlike humans, autonomous systems never get distracted, tired, or impaired.
Path Planning and Control
Once the vehicle understands its environment and predicts what might happen next, it needs to plan a safe trajectory. Machine learning algorithms evaluate thousands of potential paths in milliseconds, selecting routes that balance safety, efficiency, and passenger comfort.
These planning systems must account for physics constraints—vehicles can’t make instantaneous turns or stop on a dime. They also incorporate social conventions: humans expect certain driving behaviors, and autonomous vehicles that violate those norms (even while technically legal) create dangerous situations.
Training Machine Learning Models for Self-Driving Cars
Building neural networks that can safely navigate real-world traffic requires massive amounts of data and sophisticated training approaches.
The Data Challenge
Autonomous vehicle companies collect petabytes of driving data. Cameras, sensors, and vehicle systems record every trip, capturing both routine scenarios and edge cases—those rare, dangerous situations that test the limits of machine learning models.
The vehicle-generated data market is projected to be worth between $450 billion and $750 billion by 2030, according to industry analyses. That’s not just because of data volume, but because of its value for training increasingly capable systems.
But raw data isn’t enough. Engineers must label it: marking pedestrians, vehicles, lane lines, traffic signs, and thousands of other features in millions of images and sensor scans. This labeling process is time-consuming and expensive, but essential for supervised learning.
Simulation and Synthetic Data
Testing autonomous vehicles exclusively on public roads would take billions of miles to encounter enough rare scenarios. That’s where simulation comes in.
High-fidelity simulators create virtual environments where engineers can test how vehicles respond to situations that are too dangerous or rare to capture in real-world driving. What happens when a pedestrian jumps into traffic? How should the vehicle respond to a blown tire at highway speed?
Synthetic data generated through simulation helps fill gaps in real-world datasets. These simulated scenarios provide training examples that would take years to encounter naturally.
Deep Learning Architectures
Different machine learning architectures serve different purposes in autonomous driving systems. Convolutional neural networks excel at image recognition and object detection. Recurrent neural networks and transformers handle sequential data, predicting how traffic scenarios will evolve over time.
End-to-end learning approaches, pioneered by companies like Drive.ai, map sensor inputs directly to control outputs. These systems learn to drive by observing human demonstrations, discovering patterns that traditional rule-based systems might miss.
But here’s the challenge: deep learning models are often “black boxes.” When a neural network makes a decision, engineers can’t always explain why. That’s a problem when debugging failures or proving to regulators that systems are safe.
Safety Standards and Testing for Autonomous Systems
Safety isn’t optional for autonomous vehicles. It’s the fundamental requirement that determines whether these systems can operate on public roads.
Modified Condition/Decision Coverage Testing
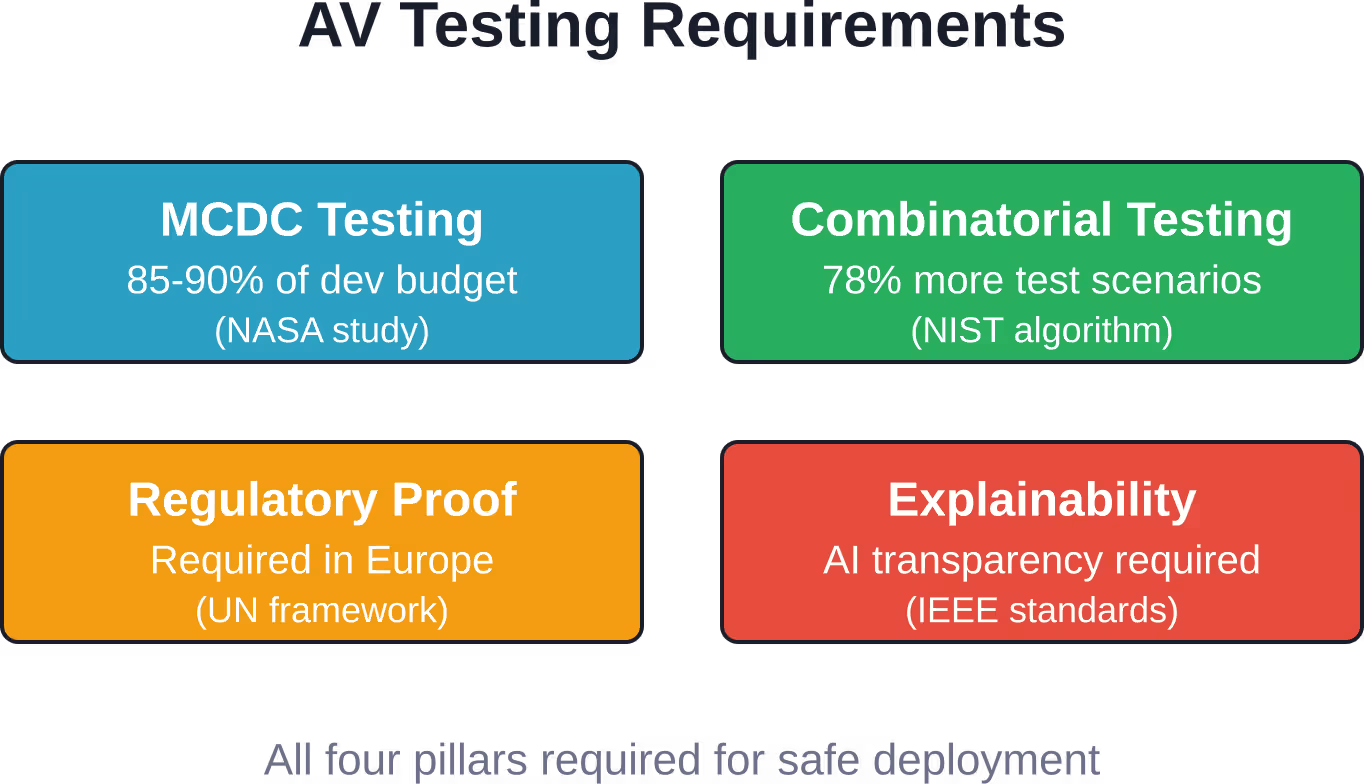
Life-critical software in aviation uses Modified Condition/Decision Coverage (MCDC) as the testing criterion, according to NIST research on autonomous systems. This rigorous standard requires that every decision within code takes every possible outcome, each condition within each decision takes every possible outcome, and every condition independently affects the decision result.
The problem? MCDC testing is resource-intensive. According to NIST research on autonomous systems, the key testing method for life-critical software such as that in aviation is Modified Condition/Decision Coverage (MCDC), which requires comprehensive decision outcome testing.
For autonomous vehicles with millions of lines of code and neural networks with billions of parameters, traditional MCDC approaches become impractical. Combinatorial testing methods generate significantly more distinct critical test scenarios than baseline approaches, making comprehensive testing more feasible.
Regulatory Frameworks
Different regions take different approaches to autonomous vehicle regulation. In Europe, regulatory frameworks under the UN regime require manufacturers to prove safe behavior before deployment, in contrast to some U.S. jurisdictions that allow self-certification.
According to RWTH Aachen University researchers, European regulatory frameworks requiring proof of safe AV behavior under the UN regime aim to avoid 99.999% of incident cases seen in less stringent jurisdictions. This stands in contrast to approaches that allow more permissive testing with less rigorous upfront validation.
IEEE standards like P3474 address human intentions and artificial intelligence alignment in autonomous driving, establishing frameworks for ensuring AI systems behave in ways that align with human expectations and safety requirements.
Explainability and Transparency
When an autonomous vehicle makes a mistake, investigators need to understand why. That requires explainable AI systems that can provide insight into their decision-making processes.
Research on testing autonomous vehicles emphasizes the importance of explainability in AI decision-making processes and protocols for assessing the robustness and ethical behavior of predictive systems. Without transparency, building public trust and meeting regulatory requirements becomes nearly impossible.
Machine learning models must balance performance with interpretability. Sometimes simpler models that engineers can fully understand are preferable to marginally more accurate but opaque deep learning systems.

Improve Autonomous Driving Models With AI Superior
Autonomous driving systems require reliable machine learning models that can process visual, sensor, and environmental data under changing conditions. AI Superior supports teams working on AI-driven systems for navigation, perception, prediction, and driving-related automation.
AI Superior can help autonomous driving teams with:
- Reviewing driving, sensor, and traffic datasets
- Defining the autonomous driving ML use case
- Building proof of concept systems
- Developing computer vision and predictive models
- Testing model performance and reliability
- Planning integration into vehicle software environments
- Supporting deployment and model refinement
For autonomous driving, this may include lane detection, object recognition, driving scene analysis, trajectory prediction, traffic behavior analysis, and navigation-related AI systems.
Reach out to AI Superior to discuss the project direction.
Challenges Facing Machine Learning in Autonomous Driving
Despite remarkable progress, significant obstacles remain before fully autonomous vehicles become commonplace.
Edge Cases and Long-Tail Scenarios
Machine learning models excel at common scenarios they’ve seen thousands of times during training. But driving presents an endless variety of unusual situations: construction zones with confusing lane markings, hand signals from police officers directing traffic, objects falling from trucks ahead.
These edge cases—individually rare but collectively inevitable—pose the greatest challenge. A neural network that performs flawlessly 99.99% of the time still encounters dangerous situations regularly when processing decisions multiple times per second for hours.
Real talk: no amount of testing can guarantee a system has encountered every possible scenario. Engineers must build models that generalize well to novel situations, recognizing when they’re uncertain and responding conservatively.
Adversarial Attacks and Security
Machine learning models can be fooled. Researchers have shown that subtle modifications to stop signs—imperceptible to humans—can cause neural networks to misclassify them as speed limit signs.
Research on explainable machine learning for secure smart vehicles emphasizes that the complexity of neural networks creates vulnerabilities. As vehicles connect to external networks through vehicle-to-everything (V2X) communications, they become potential targets for cyberattacks.
Securing these systems requires defense in depth: encrypted communications, anomaly detection, and redundant safety systems that don’t rely solely on machine learning outputs.
Ethical Decision-Making
When a crash is unavoidable, how should an autonomous vehicle decide what to do? These trolley problem scenarios—though rare—raise fundamental questions about programming ethics into algorithms.
Should vehicles prioritize passenger safety above all else? Minimize total harm? Follow rigid legal rules? Different cultures and individuals disagree on these questions, yet autonomous systems must make split-second decisions.
The IEEE draft standard on human intentions and artificial intelligence alignment in autonomous driving addresses these challenges, attempting to create frameworks for ensuring AI behavior aligns with human values and expectations.
Environmental Challenges
Machine learning models trained primarily on sunny California roads don’t necessarily perform well in Boston blizzards. Sensors get obscured by rain, snow, and fog. Lane markings disappear under snow cover. Lighting conditions vary dramatically between day and night.
Building robust systems requires training on diverse data from different geographies, weather conditions, and traffic patterns. That’s one reason autonomous vehicle testing spans multiple climates and environments.
Real-World Applications and Current Deployments
Autonomous vehicles aren’t just laboratory experiments. They’re operating today in carefully controlled environments, with capabilities expanding steadily.
Last-Mile Delivery and Shuttles
Autonomous pods serve as last-mile shuttles in controlled environments like campuses and business parks. These low-speed applications in predictable settings reduce the complexity engineers must handle.
These deployments allow companies to refine localization, V2X communications, and human-machine interaction without facing the full chaos of urban driving. They also demonstrate value to potential customers and help build public acceptance.
Highway Driving and Advanced Driver Assistance
Level 2+ automated driving systems—the focus of SAE International research on making automated driving profitable and mainstream—provide highway assistance that keeps vehicles centered in lanes, maintains safe following distances, and handles routine driving tasks.
These systems rely heavily on machine learning for perception and decision-making, but keep humans responsible for overall driving. They represent the current state of commercially available automation for most consumers.
Geofenced Urban Operations
Some companies operate fully autonomous vehicles without human safety drivers—but only in carefully mapped urban areas with favorable conditions. These geofenced deployments allow the technology to mature in controlled settings before expanding to more challenging environments.
The COVID-19 pandemic impacted development timelines. In China, while the overall automotive market faced challenges, the electric and connected vehicle segment showed resilient growth and hit record market penetration during the pandemic period. But development continued, and deployments have since resumed growth.
| Application Type | Automation Level | Key ML Challenges | Current Status |
|---|---|---|---|
| Highway Assist | Level 2+ | Lane keeping, adaptive cruise control | Commercially available |
| Last-Mile Shuttles | Level 4 (limited) | Low-speed object detection, path planning | Limited deployments |
| Geofenced Urban | Level 4 | Complex traffic, pedestrian prediction | Pilot programs |
| Full Autonomy | Level 5 | All scenarios, all conditions | Research phase |
Future Trends in Machine Learning for Autonomous Vehicles
The field continues to evolve rapidly. Several emerging trends will shape the next generation of autonomous driving systems.
Transformer Architectures and Attention Mechanisms
Transformer models—the architecture behind recent breakthroughs in natural language processing—are now being adapted for autonomous driving. Their ability to attend to relevant features across large spatial and temporal contexts makes them well-suited for understanding complex traffic scenarios.
These models can process information from multiple sensors simultaneously, learning which inputs matter most for different driving situations. They also excel at predicting how scenes will evolve over time, a critical capability for safe navigation.
Federated Learning and Privacy
Autonomous vehicles generate massive amounts of data, much of it potentially sensitive. Federated learning allows vehicles to improve their models by learning from collective experience without centralizing raw data.
Individual vehicles train on their local data, then share model updates rather than the data itself. This approach balances the benefits of learning from diverse experiences with privacy protections for passengers and pedestrians.
Reinforcement Learning from Human Feedback
Researchers are developing methods for autonomous vehicles to learn from human demonstrations and feedback. Rather than programming every behavior explicitly, these systems observe human drivers and learn to mimic successful strategies.
Constraints-driven safe reinforcement learning—research published in IEEE Xplore—ensures that vehicles learn effective behaviors while respecting safety boundaries. The system can explore and optimize, but within constraints that prevent dangerous actions during the learning process.
Multi-Agent Coordination
When multiple autonomous vehicles share the road, they can communicate and coordinate—potentially improving traffic flow and safety beyond what independent vehicles could achieve.
Machine learning models that account for multi-agent interactions can predict how other autonomous vehicles will behave, enabling smoother merging, intersection crossing, and highway platooning. This requires new training approaches that model not just individual vehicle behavior but collective dynamics.

Memory-Augmented Networks
The research from Cornell on autonomous vehicles creating “memories” of previous experiences points toward a broader trend. Memory-augmented neural networks can store and retrieve information about specific locations, traffic patterns, and successful strategies.
Rather than treating every trip as an independent problem, these systems build knowledge bases that improve performance on familiar routes while still generalizing to new areas. This approach mirrors how human drivers develop local knowledge over time.
Developing and Validating ML Models for Production AVs
Getting machine learning systems from research prototypes to production-ready autonomous vehicles requires rigorous engineering processes.
Data Pipeline Management
SAE International research on data acquisition and handling for autonomous vehicles emphasizes the complexity of managing training data at scale. Organizations must collect, label, version, and curate datasets while maintaining quality standards.
When a model performs poorly, engineers need to trace failures back to training data issues. Did the dataset lack examples of a certain scenario? Were labels incorrect? Has the real-world distribution shifted from training conditions?
Effective data pipeline management requires tools for tracking data provenance, measuring dataset diversity, and identifying gaps in coverage.
Simulation-to-Reality Transfer
Models trained primarily in simulation must successfully transfer to real-world operation. This sim-to-real gap poses challenges because simulators can’t perfectly replicate every aspect of physical environments.
Domain adaptation techniques help models generalize from synthetic training data to real sensor inputs. These methods adjust for differences in appearance, sensor noise, and physical dynamics between simulation and reality.
But validation ultimately requires real-world testing. Simulation accelerates development, but can’t fully replace on-road evaluation.
Continuous Integration and Testing
Software development for autonomous vehicles can’t follow traditional release cycles. Systems must continuously improve as engineers collect more data, refine models, and fix issues.
Continuous integration pipelines automatically test new model versions against batteries of scenarios—both real-world test drives and simulated edge cases. Regressions get caught before deployment, and improvements get validated systematically.
NIST promotes innovation and cultivates trust in the design, development, use and governance of artificial intelligence systems for autonomous vehicles. Their frameworks help organizations establish testing standards that build confidence in system safety.
Over-the-Air Updates and Monitoring
Deployed autonomous vehicles receive software updates remotely, allowing companies to fix bugs, improve performance, and add capabilities without physical recalls.
But these updates create risks. A flawed update could simultaneously affect an entire fleet. Careful rollout strategies deploy changes gradually, monitoring performance metrics before full deployment.
Continuous monitoring of deployed systems helps identify issues early. Anomaly detection flags unusual behaviors, and vehicles can report scenarios where they struggled, helping engineers identify areas for improvement.
| Development Phase | Key Activities | Validation Methods | Success Metrics |
|---|---|---|---|
| Data Collection | Sensor recording, labeling, curation | Coverage analysis, quality checks | Scenario diversity, label accuracy |
| Model Training | Architecture selection, hyperparameter tuning | Cross-validation, test set evaluation | Perception accuracy, prediction error |
| Simulation Testing | Virtual scenario generation | Edge case coverage, failure mode analysis | Pass rate, intervention frequency |
| Road Testing | Real-world validation drives | Miles per disengagement, safety driver interventions | Autonomous operation percentage |
| Deployment | Gradual rollout, monitoring | Fleet performance tracking, incident analysis | Safety metrics, user satisfaction |
Machine Learning Architectures Specific to Autonomous Driving
Different neural network architectures serve different functions in the autonomous vehicle stack.
Object Detection Networks
Models like YOLO (You Only Look Once) and Faster R-CNN detect and classify objects in camera images. These convolutional networks process images in real-time, drawing bounding boxes around pedestrians, vehicles, cyclists, and other road users.
Modern detection networks don’t just identify what objects are present—they estimate distance, predict motion, and assess uncertainty. These additional outputs help downstream planning systems make better decisions.
Semantic Segmentation
Rather than drawing boxes around objects, semantic segmentation assigns a class label to every pixel in an image: road, sidewalk, vehicle, building, sky, vegetation.
This pixel-level understanding helps autonomous vehicles understand drivable surfaces, identify lane boundaries, and distinguish between different types of obstacles. Segmentation models also detect road markings, crosswalks, and other pavement features critical for navigation.
Temporal Models for Prediction
Autonomous vehicles must predict how traffic scenarios will unfold over the next several seconds. Recurrent neural networks and temporal convolutional networks process sequences of observations to forecast future states.
These models learn that pedestrians near crosswalks are more likely to enter the road, that vehicles slowing ahead often indicate traffic congestion, and that turn signals predict lane changes. Accurate prediction allows autonomous systems to plan proactively rather than reactively.
End-to-End Learning
Some approaches skip explicit perception and prediction modules, learning direct mappings from sensor inputs to control outputs. End-to-end networks observe human driving and learn to imitate successful behaviors.
These systems can discover subtle patterns that hand-engineered pipelines miss. But they sacrifice interpretability—when something goes wrong, debugging is harder because there’s no clear separation of perception, prediction, and planning failures.
Frequently Asked Questions
How do autonomous vehicles use machine learning to detect pedestrians?
Autonomous vehicles employ convolutional neural networks trained on millions of labeled images to detect pedestrians in camera feeds. These models identify human shapes, postures, and movement patterns even in challenging conditions like poor lighting or partial occlusion. Sensor fusion combines camera data with LiDAR and radar inputs to confirm detections and estimate pedestrian positions accurately. The system continuously tracks detected pedestrians, predicting their likely paths to avoid collisions.
What’s the difference between Level 2 and Level 4 autonomous driving?
Level 2 systems provide driver assistance features like adaptive cruise control and lane keeping, but humans remain responsible for monitoring the environment and must be ready to take control instantly. Level 4 systems handle all driving tasks within specific conditions—like geofenced urban areas or highways—without human intervention, though they may request handoff when approaching their operational boundaries. The machine learning requirements differ substantially: Level 4 systems need far more robust perception, prediction, and planning capabilities to operate safely without human backup.
How much testing is required before autonomous vehicles can operate safely?
According to industry benchmarks, verification and testing (including MCDC) typically account for 50% to 70% of the total development costs for safety-critical software. For autonomous vehicles, comprehensive testing requires millions of miles of real-world driving plus billions of simulated miles covering edge cases. European regulatory frameworks require manufacturers to prove safe behavior before deployment, rather than allowing self-certification. New combinatorial testing methods from NIST generate 78% more distinct critical test scenarios than baseline approaches, making thorough validation more feasible.
Can autonomous vehicles handle bad weather conditions?
Weather remains one of the biggest challenges for autonomous vehicle machine learning systems. Heavy rain, snow, and fog degrade sensor performance—cameras lose visibility, LiDAR returns scatter off precipitation, and road markings disappear under snow cover. Current systems perform best in clear weather and may request human takeover or reduce operational capabilities in severe conditions. Researchers are developing weather-robust models trained on diverse climate data and exploring sensor fusion strategies that leverage each sensor’s relative strengths under different conditions.
How do autonomous vehicles learn from experience?
Cornell researchers developed systems allowing autonomous vehicles to create “memories” of previous traversals and use them in future navigation. Vehicles store information about challenging intersections, traffic patterns at different times of day, and successful strategies for familiar routes. These memory-augmented systems improve performance through experience while maintaining the ability to handle new environments. Machine learning models continuously update as vehicles collect more data, though updates undergo rigorous testing before deployment to ensure improvements don’t introduce new risks.
What prevents hackers from fooling autonomous vehicle AI systems?
Research on explainable machine learning for secure smart vehicles identifies several defenses against adversarial attacks. Redundant sensor modalities make attacks harder—fooling both cameras and LiDAR simultaneously requires more sophisticated exploits. Anomaly detection systems flag unusual patterns that might indicate attacks or sensor malfunctions. Encrypted V2X communications prevent message spoofing. Defense-in-depth approaches ensure that even if one system is compromised, safety-critical functions have backup protections. However, securing complex neural networks against all possible attacks remains an active research challenge.
When will fully autonomous vehicles be widely available?
The timeline for Level 5 full autonomy—vehicles that can handle all scenarios in all conditions—remains uncertain. Current deployments focus on Level 4 systems operating in geofenced areas with favorable conditions. The transition from 99% reliability to the 99.999% or better reliability needed for unsupervised operation across all environments is proving more difficult than early predictions suggested. Industry analyses indicate limited Level 4 deployments will expand gradually through 2030, with broader adoption dependent on solving remaining technical challenges around edge cases, weather robustness, and regulatory approval.
The Road Ahead
Machine learning has transformed autonomous vehicles from a distant dream to a developing reality. Neural networks enable perception systems that rival human vision, prediction models that anticipate driver behavior, and planning algorithms that navigate complex traffic.
But significant challenges remain. Edge cases still confound even the most sophisticated systems. Weather degrades sensor performance. Regulatory frameworks struggle to keep pace with technological capabilities. And the 99.999% reliability standard needed for public trust requires solving problems at the margins of current machine learning capabilities.
The path forward combines technical innovation with rigorous validation. Transformer architectures and attention mechanisms promise better scene understanding. Federated learning allows privacy-preserving improvement from collective experience. Safe reinforcement learning with human feedback creates systems that learn while respecting safety boundaries.
Testing standards from NIST, safety frameworks from IEEE, and regulatory requirements in Europe and elsewhere ensure that autonomous vehicles meet stringent safety requirements before widespread deployment. These guardrails may slow development, but they’re essential for building systems people can trust.
The global autonomous vehicle market was valued at around $50–80 billion in 2020 (depending on the scope of Level 3+ systems) and has grown significantly faster than early forecasts predicted. By 2025 the market reached approximately $200–300 billion, and in 2026 it is estimated at $250–400+ billion, with many analysts projecting continued strong double-digit CAGR (30–35%+ in optimistic scenarios).
Autonomous vehicle technology is advancing, deployments are expanding, and machine learning capabilities continue improving.
For engineers working in this space, the challenges are immense but the potential impact is transformative. Autonomous vehicles could reduce traffic deaths, improve mobility for people unable to drive, and fundamentally reshape urban transportation.
The machine learning systems enabling this transformation must be robust, safe, and trustworthy. That requires not just algorithmic innovation, but rigorous engineering processes, comprehensive testing, and regulatory frameworks that prioritize public safety.
The autonomous driving future is being built today—one neural network, one test scenario, and one safety validation at a time.