Korte samenvatting: Machine learning stelt autonome voertuigen in staat hun omgeving waar te nemen, realtime beslissingen te nemen en de veiligheid te verbeteren door middel van neurale netwerken, computervisie en sensorfusie. Deep learning-modellen verwerken gegevens van camera's, LiDAR en radar om objecten te detecteren, gedrag te voorspellen en te navigeren in complexe verkeerssituaties. Testnormen zoals MCDC en frameworks van NIST zorgen ervoor dat deze systemen voldoen aan de veiligheidseisen voordat ze in gebruik worden genomen.
Autonome voertuigen zijn geen sciencefiction meer. Ze rijden door steden, leren van miljoenen afgelegde kilometers en veranderen de manier waarop transport werkt.
Wat vormt de kern van deze transformatie? Machine learning. Neurale netwerken die voetgangers in milliseconden kunnen herkennen, algoritmes die voorspellen wat andere bestuurders vervolgens zullen doen, en systemen die met elke rit beter worden.
De wereldwijde markt voor autonome voertuigen had in 2020 een waarde van ongeveer 150-80 miljard dollar (afhankelijk van de omvang van de Level 3+-systemen) en is aanzienlijk sneller gegroeid dan aanvankelijk werd voorspeld. Tegen 2025 zal de markt naar schatting 200-300 miljard dollar bedragen en in 2026 wordt deze geschat op 250-400 miljard dollar of meer, waarbij veel analisten een aanhoudende sterke groei met dubbele cijfers verwachten (30-351 biljoen dollar of meer in optimistische scenario's).
Die explosieve groei heeft niet alleen te maken met hardware, maar wordt ook mogelijk gemaakt door vooruitgang in kunstmatige intelligentie, waardoor voertuigen slimmer, veiliger en capabeler worden.
Maar er is iets belangrijks om te weten: het bouwen van machine learning-systemen voor autonoom rijden is niet hetzelfde als het ontwikkelen van een aanbevelingssysteem of een chatbot. Wanneer een algoritme een fout maakt, staan mensenlevens op het spel.
Dit brengt unieke uitdagingen met zich mee. Hoe trainen ingenieurs neurale netwerken om situaties aan te kunnen die ze nog nooit hebben gezien? Welke testnormen garanderen dat deze systemen veilig genoeg zijn voor de openbare weg? En hoe vinden toezichthouders een balans tussen innovatie en openbare veiligheid?
Hoe machine learning de basis vormt voor autonome voertuigsystemen
Machine learning ondersteunt niet alleen autonome voertuigen, het maakt ze fundamenteel mogelijk. Zonder neurale netwerken die sensorgegevens in realtime verwerken, zouden zelfrijdende auto's niet kunnen functioneren.
De technologiestack is opgebouwd uit verschillende onderling verbonden lagen.
Waarneming door middel van computervisie
Computervisie-algoritmen analyseren camerabeelden om objecten te identificeren, verkeersborden te lezen en de geometrie van de weg te begrijpen. Convolutionele neurale netwerken, getraind op miljoenen gelabelde afbeeldingen, kunnen onderscheid maken tussen een voetganger, een fietser en een winkelwagen, zelfs bij slechte lichtomstandigheden.
Deze systemen werken niet op zichzelf. Ze combineren gegevens uit meerdere bronnen: camera's leveren gedetailleerde beelden, LiDAR creëert nauwkeurige 3D-kaarten en radar detecteert objecten door mist en regen.
Geavanceerde besturingssystemen decoderen deze materiaaldatagegevens om obstakels en belangrijke markeringen te identificeren en de juiste koers te bepalen. De combinatie van deze sensorinputs zorgt voor een alomvattend begrip van de omgeving van het voertuig dat veel robuuster is dan wat een enkele sensor zou kunnen bieden.
Neurale netwerken voor besluitvorming
Waarneming is slechts de eerste stap. Autonome voertuigen moeten interpreteren wat ze zien en beslissen hoe ze moeten reageren.
Diepe neurale netwerken verwerken de gecombineerde sensorgegevens om te voorspellen hoe verkeerssituaties zich zullen ontwikkelen. Als een voetganger bij een zebrapad staat, stapt hij dan de weg op? Als een auto voor je plotseling remt, is dat dan een noodsituatie of een normale verkeersvertraging?
Onderzoekers van Cornell onder leiding van Kilian Weinberger hebben systemen ontwikkeld waarmee autonome voertuigen 'geheugen' van eerdere ervaringen kunnen creëren en deze kunnen gebruiken bij toekomstige navigatie. Deze voertuigen leren bekende routes, anticiperen op lastige kruispunten en passen hun gedrag aan op basis van eerdere ritten.
Dit op ervaring gebaseerde leerproces bootst na hoe menselijke bestuurders in de loop der tijd intuïtie ontwikkelen. Maar in tegenstelling tot mensen raken autonome systemen nooit afgeleid, moe of beperkt in hun functioneren.
Routeplanning en -besturing
Zodra het voertuig zijn omgeving begrijpt en voorspelt wat er vervolgens kan gebeuren, moet het een veilige route plannen. Machine learning-algoritmen evalueren duizenden mogelijke routes in milliseconden en selecteren routes die een balans bieden tussen veiligheid, efficiëntie en passagierscomfort.
Deze planningssystemen moeten rekening houden met natuurkundige beperkingen: voertuigen kunnen niet direct een bocht maken of abrupt stoppen. Ze integreren ook sociale conventies: mensen verwachten bepaald rijgedrag, en autonome voertuigen die deze normen schenden (zelfs als ze technisch gezien legaal zijn) creëren gevaarlijke situaties.
Machine learning-modellen trainen voor zelfrijdende auto's
Het bouwen van neurale netwerken die veilig door het verkeer in de echte wereld kunnen navigeren, vereist enorme hoeveelheden data en geavanceerde trainingsmethoden.
De data-uitdaging
Bedrijven die autonome voertuigen ontwikkelen, verzamelen petabytes aan rijgegevens. Camera's, sensoren en voertuigsystemen registreren elke rit, zowel routinematige scenario's als uitzonderlijke gevallen – die zeldzame, gevaarlijke situaties die de grenzen van machine learning-modellen op de proef stellen.
Volgens brancheanalyses zal de markt voor door voertuigen gegenereerde data in 2030 naar verwachting tussen de 1.450 miljard en 1.750 miljard dollar waard zijn. Dat komt niet alleen door het volume aan data, maar ook door de waarde ervan voor het trainen van steeds geavanceerdere systemen.
Maar ruwe data alleen is niet genoeg. Ingenieurs moeten de data labelen: voetgangers, voertuigen, rijstrookmarkeringen, verkeersborden en duizenden andere kenmerken markeren in miljoenen afbeeldingen en sensorscans. Dit labelproces is tijdrovend en kostbaar, maar essentieel voor supervised learning.
Simulatie en synthetische data
Het testen van autonome voertuigen uitsluitend op openbare wegen zou miljarden kilometers vergen om voldoende zeldzame scenario's tegen te komen. Dat is waar simulatie van pas komt.
Hoogwaardige simulatoren creëren virtuele omgevingen waarin ingenieurs kunnen testen hoe voertuigen reageren op situaties die te gevaarlijk of te zeldzaam zijn om in de praktijk na te bootsen. Wat gebeurt er bijvoorbeeld als een voetganger de weg op springt? Hoe moet een voertuig reageren op een lekke band bij hoge snelheid?
Synthetische data, gegenereerd door middel van simulatie, helpt hiaten in datasets uit de praktijk op te vullen. Deze gesimuleerde scenario's bieden trainingsvoorbeelden die in de praktijk pas na jaren zouden worden aangetroffen.
Deep Learning-architecturen
Verschillende machine learning-architecturen dienen verschillende doeleinden in autonome rijsystemen. Convolutionele neurale netwerken blinken uit in beeldherkenning en objectdetectie. Recurrente neurale netwerken en transformernetwerken verwerken sequentiële data en voorspellen hoe verkeerssituaties zich in de loop van de tijd zullen ontwikkelen.
End-to-end leerbenaderingen, ontwikkeld door bedrijven zoals Drive.ai, koppelen sensorinputs direct aan besturingsoutputs. Deze systemen leren rijden door menselijke demonstraties te observeren en ontdekken patronen die traditionele, op regels gebaseerde systemen mogelijk over het hoofd zien.
Maar hier ligt de uitdaging: deep learning-modellen zijn vaak 'black boxes'. Wanneer een neuraal netwerk een beslissing neemt, kunnen ingenieurs niet altijd uitleggen waarom. Dat is een probleem bij het opsporen van fouten of bij het bewijzen aan toezichthouders dat systemen veilig zijn.
Veiligheidsnormen en -testen voor autonome systemen
Veiligheid is geen optie voor autonome voertuigen. Het is de fundamentele vereiste die bepaalt of deze systemen op de openbare weg mogen rijden.
Gewijzigde conditie-/beslissingsdekkingstesten
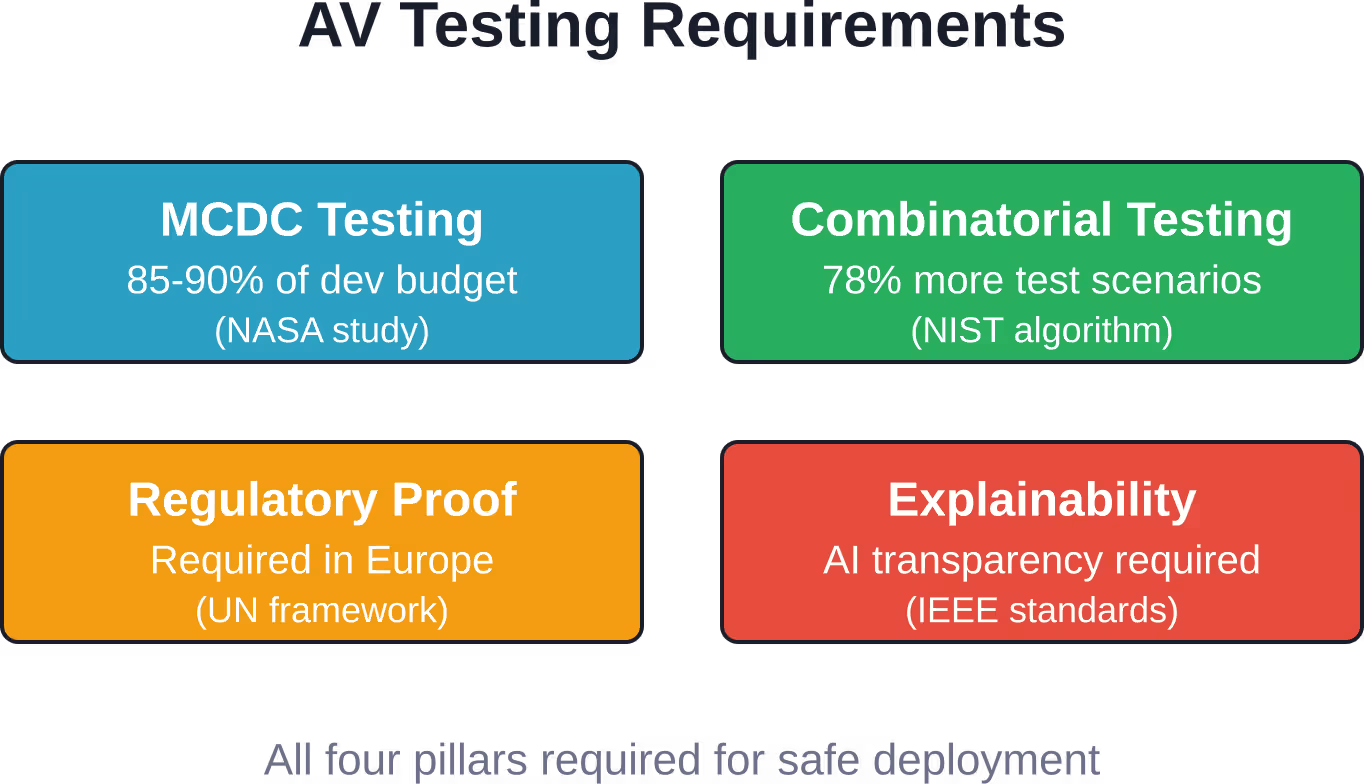
Levensreddende software in de luchtvaart gebruikt Modified Condition/Decision Coverage (MCDC) als testcriterium, volgens onderzoek van NIST naar autonome systemen. Deze strenge norm vereist dat elke beslissing in de code elke mogelijke uitkomst omvat, elke voorwaarde binnen elke beslissing elke mogelijke uitkomst omvat en elke voorwaarde onafhankelijk van invloed is op het beslissingsresultaat.
Het probleem? MCDC-testen zijn arbeidsintensief. Volgens onderzoek van NIST naar autonome systemen is de belangrijkste testmethode voor levensreddende software, zoals die in de luchtvaart, Modified Condition/Decision Coverage (MCDC), wat uitgebreide testen van de beslissingsuitkomsten vereist.
Voor autonome voertuigen met miljoenen regels code en neurale netwerken met miljarden parameters worden traditionele MCDC-benaderingen onpraktisch. Combinatorische testmethoden genereren aanzienlijk meer verschillende kritieke testscenario's dan basisbenaderingen, waardoor uitgebreide tests beter uitvoerbaar worden.
Regelgevingskaders
Verschillende regio's hanteren verschillende benaderingen voor de regulering van autonome voertuigen. In Europa vereisen de regelgevingskaders onder het VN-regime dat fabrikanten het veilige gedrag aantonen vóór de inzet, in tegenstelling tot sommige Amerikaanse jurisdicties die zelfcertificering toestaan.
Volgens onderzoekers van de RWTH Aachen University zijn Europese regelgevingskaders die bewijs van veilig gedrag van autonome voertuigen vereisen onder het VN-regime, bedoeld om 99,9991% van de incidenten te voorkomen die zich voordoen in minder strenge rechtsgebieden. Dit staat in contrast met benaderingen die meer permissieve tests toestaan met minder strenge voorafgaande validatie.
IEEE-normen zoals P3474 behandelen de afstemming tussen menselijke intenties en kunstmatige intelligentie bij autonoom rijden, en stellen kaders vast om ervoor te zorgen dat AI-systemen zich gedragen op een manier die aansluit bij menselijke verwachtingen en veiligheidseisen.
Verklaarbaarheid en transparantie
Wanneer een autonoom voertuig een fout maakt, moeten onderzoekers begrijpen waarom. Daarvoor zijn verklaarbare AI-systemen nodig die inzicht kunnen geven in hun besluitvormingsprocessen.
Onderzoek naar het testen van autonome voertuigen benadrukt het belang van verklaarbaarheid in AI-besluitvormingsprocessen en protocollen voor het beoordelen van de robuustheid en het ethische gedrag van voorspellende systemen. Zonder transparantie wordt het opbouwen van publiek vertrouwen en het voldoen aan wettelijke eisen vrijwel onmogelijk.
Machine learning-modellen moeten een balans vinden tussen prestaties en interpreteerbaarheid. Soms zijn eenvoudigere modellen die ingenieurs volledig kunnen begrijpen te verkiezen boven marginaal nauwkeurigere, maar minder transparante deep learning-systemen.

Verbeter autonome rijmodellen met superieure AI
Autonome rijsystemen vereisen betrouwbare machine learning-modellen die visuele, sensor- en omgevingsgegevens onder veranderende omstandigheden kunnen verwerken. AI Superieur ondersteunt teams die werken aan AI-gestuurde systemen voor navigatie, waarneming, voorspelling en rijgerelateerde automatisering.
AI Superior kan teams die zich bezighouden met autonoom rijden helpen met:
- Analyse van rijgedrag-, sensor- en verkeersgegevens.
- Het definiëren van de toepassing van machine learning voor autonoom rijden
- Het bouwen van proof-of-concept-systemen
- Het ontwikkelen van computervisie en voorspellende modellen.
- Testen van de prestaties en betrouwbaarheid van het model
- Planningintegratie in voertuigsoftwareomgevingen
- Ondersteuning bij de implementatie en verfijning van het model.
Voor autonoom rijden kan dit onder meer bestaan uit rijstrookdetectie, objectherkenning, analyse van de rijomgeving, trajectvoorspelling, analyse van verkeersgedrag en AI-systemen voor navigatie.
Neem contact op met AI Superior om de projectrichting te bespreken.
Uitdagingen voor machinaal leren in autonoom rijden
Ondanks de opmerkelijke vooruitgang blijven er aanzienlijke obstakels bestaan voordat volledig autonome voertuigen gemeengoed worden.
Randgevallen en scenario's met een lange staart
Machine learning-modellen blinken uit in veelvoorkomende scenario's die ze duizenden keren tijdens de training hebben gezien. Maar autorijden brengt een eindeloze variatie aan ongebruikelijke situaties met zich mee: bouwzones met verwarrende rijstrookmarkeringen, handgebaren van politieagenten die het verkeer regelen, objecten die van vrachtwagens vallen.
Deze uitzonderlijke gevallen – afzonderlijk zeldzaam maar collectief onvermijdelijk – vormen de grootste uitdaging. Een neuraal netwerk dat 99,99% van de tijd foutloos presteert, komt nog steeds regelmatig gevaarlijke situaties tegen wanneer het urenlang meerdere keren per seconde beslissingen verwerkt.
Eerlijk gezegd: geen enkele test kan garanderen dat een systeem elk mogelijk scenario heeft meegemaakt. Ingenieurs moeten modellen bouwen die goed generaliseren naar nieuwe situaties, waarbij ze onzekerheden herkennen en daar conservatief op reageren.
Vijandige aanvallen en beveiliging
Machine learning-modellen kunnen misleid worden. Onderzoekers hebben aangetoond dat subtiele aanpassingen aan stopborden – die voor mensen onmerkbaar zijn – ervoor kunnen zorgen dat neurale netwerken ze ten onrechte als snelheidslimietborden interpreteren.
Onderzoek naar verklaarbaar machinaal leren voor veilige slimme voertuigen benadrukt dat de complexiteit van neurale netwerken kwetsbaarheden creëert. Doordat voertuigen via voertuig-naar-alles (V2X)-communicatie verbinding maken met externe netwerken, worden ze potentiële doelwitten voor cyberaanvallen.
Het beveiligen van deze systemen vereist een gelaagde beveiliging: versleutelde communicatie, detectie van afwijkingen en redundante veiligheidssystemen die niet uitsluitend afhankelijk zijn van de resultaten van machine learning.
Ethische besluitvorming
Als een botsing onvermijdelijk is, hoe moet een autonoom voertuig dan beslissen wat te doen? Deze scenario's, vergelijkbaar met het trolleyprobleem, roepen – hoewel zeldzaam – fundamentele vragen op over de ethiek die in algoritmes wordt geprogrammeerd.
Moeten voertuigen de veiligheid van passagiers boven alles stellen? De totale schade minimaliseren? Strikte wettelijke regels volgen? Verschillende culturen en individuen verschillen van mening over deze vragen, maar autonome systemen moeten in een fractie van een seconde beslissingen nemen.
De IEEE-ontwerpstandaard over de afstemming van menselijke intenties en kunstmatige intelligentie bij autonoom rijden pakt deze uitdagingen aan en probeert kaders te creëren om ervoor te zorgen dat het gedrag van AI aansluit bij menselijke waarden en verwachtingen.
Milieu-uitdagingen
Machine learning-modellen die voornamelijk zijn getraind op zonnige wegen in Californië, presteren niet per se goed tijdens sneeuwstormen in Boston. Sensoren worden onzichtbaar door regen, sneeuw en mist. Rijstrookmarkeringen verdwijnen onder een sneeuwdek. De lichtomstandigheden variëren sterk tussen dag en nacht.
Het bouwen van robuuste systemen vereist training met diverse gegevens uit verschillende geografische gebieden, weersomstandigheden en verkeerspatronen. Dat is een van de redenen waarom het testen van autonome voertuigen zich uitstrekt over meerdere klimaten en omgevingen.
Praktische toepassingen en huidige implementaties
Autonome voertuigen zijn niet langer louter laboratoriumexperimenten. Ze functioneren vandaag de dag in zorgvuldig gecontroleerde omgevingen en hun mogelijkheden worden gestaag uitgebreid.
Levering en pendeldiensten voor de laatste kilometers
Autonome pods fungeren als 'last-mile shuttles' in gecontroleerde omgevingen zoals campussen en bedrijventerreinen. Deze toepassingen met lage snelheden in voorspelbare omgevingen verminderen de complexiteit waarmee ingenieurs te maken krijgen.
Deze implementaties stellen bedrijven in staat om lokalisatie, V2X-communicatie en mens-machine-interactie te verfijnen zonder de volledige chaos van het stadsverkeer te hoeven ervaren. Ze tonen bovendien de waarde aan potentiële klanten en dragen bij aan de acceptatie door het publiek.
Rijden op de snelweg en geavanceerde rijhulpsystemen
Autonome rijsystemen van niveau 2+ – waarop het onderzoek van SAE International zich richt om autonoom rijden winstgevend en gangbaar te maken – bieden ondersteuning op de snelweg door voertuigen in het midden van de rijstrook te houden, een veilige afstand tot de voorligger te bewaren en routinematige rijtaken uit te voeren.
Deze systemen zijn sterk afhankelijk van machinaal leren voor waarneming en besluitvorming, maar de mens blijft verantwoordelijk voor het algehele rijden. Ze vertegenwoordigen de huidige stand van commercieel beschikbare automatisering voor de meeste consumenten.
Geofencedeerde stedelijke operaties
Sommige bedrijven zetten volledig autonome voertuigen in zonder menselijke veiligheidsbestuurders, maar alleen in zorgvuldig in kaart gebrachte stedelijke gebieden met gunstige omstandigheden. Deze afgebakende gebieden stellen de technologie in staat om zich in gecontroleerde omgevingen te ontwikkelen voordat ze wordt ingezet in meer uitdagende omgevingen.
De COVID-19-pandemie had gevolgen voor de ontwikkelingstermijnen. In China ondervond de automarkt als geheel uitdagingen, maar het segment van elektrische en connected voertuigen liet een veerkrachtige groei zien en bereikte een recordmarktpenetratie tijdens de pandemie. De ontwikkeling ging echter door en de implementaties zijn sindsdien weer toegenomen.
| Toepassingstype | Automatiseringsniveau | Belangrijkste uitdagingen voor machine learning | Huidige status |
|---|---|---|---|
| Snelwegassistentie | Niveau 2+ | Rijstrookassistentie, adaptieve cruisecontrol | Commercieel verkrijgbaar |
| Pendeldiensten voor de laatste kilometers | Niveau 4 (beperkt) | Detectie van objecten bij lage snelheid, padplanning | Beperkte implementaties |
| Geofenced stedelijk gebied | Niveau 4 | Complexe verkeers- en voetgangersvoorspellingen | Proefprogramma's |
| Volledige autonomie | Niveau 5 | Alle scenario's, alle omstandigheden | Onderzoeksfase |
Toekomstige trends in machinaal leren voor autonome voertuigen
Het vakgebied blijft zich snel ontwikkelen. Verschillende opkomende trends zullen de volgende generatie autonome rijsystemen vormgeven.
Transformer-architecturen en aandachtmechanismen
Transformer-modellen – de architectuur achter recente doorbraken in natuurlijke taalverwerking – worden nu aangepast voor autonoom rijden. Hun vermogen om relevante kenmerken te herkennen in grote ruimtelijke en temporele contexten maakt ze uitermate geschikt voor het begrijpen van complexe verkeerssituaties.
Deze modellen kunnen informatie van meerdere sensoren tegelijk verwerken en leren welke input het belangrijkst is in verschillende rijsituaties. Ze blinken ook uit in het voorspellen hoe scènes zich in de loop van de tijd zullen ontwikkelen, een cruciale vaardigheid voor veilige navigatie.
Gefedereerd leren en privacy
Autonome voertuigen genereren enorme hoeveelheden data, waarvan een groot deel potentieel gevoelig is. Dankzij federated learning kunnen voertuigen hun modellen verbeteren door te leren van collectieve ervaringen, zonder de ruwe data te centraliseren.
Individuele voertuigen trainen op basis van hun lokale gegevens en delen vervolgens modelupdates in plaats van de gegevens zelf. Deze aanpak biedt een evenwicht tussen de voordelen van leren van diverse ervaringen en de bescherming van de privacy van passagiers en voetgangers.
Reinforcement learning op basis van menselijke feedback
Onderzoekers ontwikkelen methoden waarmee autonome voertuigen kunnen leren van demonstraties en feedback van mensen. In plaats van elk gedrag expliciet te programmeren, observeren deze systemen menselijke bestuurders en leren ze succesvolle strategieën na te bootsen.
Beperkingengestuurd veilig versterkingsleren – onderzoek gepubliceerd in IEEE Xplore – zorgt ervoor dat voertuigen effectief gedrag aanleren met respect voor veiligheidsgrenzen. Het systeem kan verkennen en optimaliseren, maar wel binnen beperkingen die gevaarlijke acties tijdens het leerproces voorkomen.
Coördinatie tussen meerdere agenten
Wanneer meerdere autonome voertuigen de weg delen, kunnen ze met elkaar communiceren en coördineren, wat mogelijk de verkeersdoorstroming en -veiligheid verbetert op een manier die niet mogelijk is met individuele voertuigen.
Machine learning-modellen die rekening houden met interacties tussen meerdere agenten kunnen voorspellen hoe andere autonome voertuigen zich zullen gedragen, waardoor soepeler invoegen, kruispuntovergangen en het rijden in konvooi op de snelweg mogelijk wordt. Dit vereist nieuwe trainingsmethoden die niet alleen het gedrag van individuele voertuigen modelleren, maar ook de collectieve dynamiek.

Geheugenversterkte netwerken
Het onderzoek van Cornell naar autonome voertuigen die "geheugen" van eerdere ervaringen creëren, wijst op een bredere trend. Met geheugen versterkte neurale netwerken kunnen informatie over specifieke locaties, verkeerspatronen en succesvolle strategieën opslaan en ophalen.
In plaats van elke rit als een onafhankelijk probleem te behandelen, bouwen deze systemen kennisbases op die de prestaties op bekende routes verbeteren en tegelijkertijd generaliseren naar nieuwe gebieden. Deze aanpak weerspiegelt hoe menselijke bestuurders in de loop der tijd lokale kennis opbouwen.
Het ontwikkelen en valideren van ML-modellen voor productie-AV's
Het ontwikkelen van machine learning-systemen van onderzoeksprototypes tot productierijpe autonome voertuigen vereist strenge engineeringprocessen.
Beheer van gegevenspijplijnen
Onderzoek van SAE International naar data-acquisitie en -verwerking voor autonome voertuigen benadrukt de complexiteit van het beheren van trainingsdata op grote schaal. Organisaties moeten datasets verzamelen, labelen, versiebeheer toepassen en beheren, terwijl ze tegelijkertijd kwaliteitsnormen handhaven.
Wanneer een model slecht presteert, moeten ingenieurs de oorzaak van de problemen terugvoeren naar de trainingsdata. Ontbraken er voorbeelden van een bepaald scenario in de dataset? Waren de labels onjuist? Is de werkelijke verdeling afgeweken van de trainingscondities?
Effectief beheer van datapijplijnen vereist tools voor het traceren van de herkomst van gegevens, het meten van de diversiteit van datasets en het identificeren van hiaten in de dekking.
Overdracht van simulatie naar realiteit
Modellen die primair in simulaties zijn getraind, moeten succesvol in de praktijk kunnen worden toegepast. Deze kloof tussen simulatie en realiteit brengt uitdagingen met zich mee, omdat simulators niet elk aspect van de fysieke omgeving perfect kunnen nabootsen.
Domeinadaptatietechnieken helpen modellen te generaliseren van synthetische trainingsdata naar echte sensorinputs. Deze methoden corrigeren voor verschillen in uiterlijk, sensorruis en fysieke dynamiek tussen simulatie en werkelijkheid.
Maar validatie vereist uiteindelijk praktijktesten. Simulatie versnelt de ontwikkeling, maar kan een evaluatie op de weg niet volledig vervangen.
Continue integratie en testen
Softwareontwikkeling voor autonome voertuigen kan niet volgens traditionele releasecycli verlopen. Systemen moeten continu verbeterd worden naarmate ingenieurs meer data verzamelen, modellen verfijnen en problemen oplossen.
Continue integratie-pipelines testen automatisch nieuwe modelversies aan de hand van een reeks scenario's, zowel praktijktests als gesimuleerde randgevallen. Regressies worden opgespoord vóór de implementatie en verbeteringen worden systematisch gevalideerd.
NIST bevordert innovatie en kweekt vertrouwen in het ontwerp, de ontwikkeling, het gebruik en het beheer van kunstmatige intelligentiesystemen voor autonome voertuigen. Hun raamwerken helpen organisaties bij het vaststellen van testnormen die het vertrouwen in de systeemveiligheid vergroten.
Draadloze updates en monitoring
Autonome voertuigen die al in gebruik zijn, ontvangen software-updates op afstand. Hierdoor kunnen bedrijven bugs verhelpen, de prestaties verbeteren en functionaliteiten toevoegen zonder dat er fysieke terugroepacties nodig zijn.
Maar deze updates brengen risico's met zich mee. Een gebrekkige update kan tegelijkertijd een hele vloot beïnvloeden. Zorgvuldige uitrolstrategieën voeren wijzigingen geleidelijk door en monitoren de prestatiecijfers vóór de volledige implementatie.
Continue monitoring van ingezette systemen helpt om problemen vroegtijdig te signaleren. Anomaliedetectie signaleert ongebruikelijk gedrag en voertuigen kunnen scenario's rapporteren waarin ze problemen ondervonden, waardoor technici verbeterpunten kunnen identificeren.
| Ontwikkelingsfase | Belangrijkste activiteiten | Validatiemethoden | Succesindicatoren |
|---|---|---|---|
| Gegevensverzameling | Sensorregistratie, labeling, beheer | Dekkingsanalyse, kwaliteitscontroles | Scenario-diversiteit, nauwkeurigheid van labels |
| Modeltraining | Architectuurselectie, hyperparameteroptimalisatie | Kruisvalidatie, evaluatie van de testset | Waarnemingsnauwkeurigheid, voorspellingsfout |
| Simulatietesten | Virtuele scenario-generatie | Dekking van randgevallen, analyse van faalmodi | Slagingspercentage, interventiefrequentie |
| Wegtesten | Validatie in de praktijk | Kilometers per ontkoppeling, veiligheidsinterventies door de bestuurder | Percentage autonome werking |
| Inzet | Geleidelijke uitrol, monitoring | Prestatiebewaking van het wagenpark, incidentanalyse | Veiligheidsstatistieken, gebruikerstevredenheid |
Machine learning-architecturen specifiek voor autonoom rijden
Verschillende neurale netwerkarchitecturen vervullen verschillende functies in de architectuur van autonome voertuigen.
Objectdetectienetwerken
Modellen zoals YOLO (You Only Look Once) en Faster R-CNN detecteren en classificeren objecten in camerabeelden. Deze convolutionele netwerken verwerken beelden in realtime en tekenen begrenzingskaders rond voetgangers, voertuigen, fietsers en andere weggebruikers.
Moderne detectienetwerken identificeren niet alleen welke objecten aanwezig zijn, maar schatten ook de afstand, voorspellen beweging en beoordelen de onzekerheid. Deze extra resultaten helpen planningssystemen die verderop in het proces actief zijn om betere beslissingen te nemen.
Semantische segmentatie
In plaats van kaders rond objecten te tekenen, kent semantische segmentatie aan elke pixel in een afbeelding een klasselabel toe: weg, trottoir, voertuig, gebouw, lucht, vegetatie.
Dit inzicht op pixelniveau helpt autonome voertuigen om begaanbare oppervlakken te herkennen, rijstrookgrenzen te identificeren en onderscheid te maken tussen verschillende soorten obstakels. Segmentatiemodellen detecteren ook wegmarkeringen, zebrapaden en andere wegdekkenmerken die cruciaal zijn voor de navigatie.
Tijdsmodellen voor voorspellingen
Autonome voertuigen moeten voorspellen hoe verkeerssituaties zich de komende seconden zullen ontwikkelen. Recurrente neurale netwerken en temporele convolutionele netwerken verwerken reeksen van waarnemingen om toekomstige toestanden te voorspellen.
Deze modellen leren dat voetgangers in de buurt van zebrapaden eerder geneigd zijn de weg op te gaan, dat voertuigen die voor hen afremmen vaak wijzen op filevorming, en dat richtingaanwijzers rijstrookwisselingen voorspellen. Nauwkeurige voorspellingen stellen autonome systemen in staat proactief in plaats van reactief te plannen.
End-to-end leren
Sommige benaderingen slaan expliciete perceptie- en voorspellingsmodules over en leren directe verbanden tussen sensorinputs en besturingsoutputs. End-to-end netwerken observeren menselijk rijgedrag en leren succesvol gedrag na te bootsen.
Deze systemen kunnen subtiele patronen ontdekken die handmatig ontworpen pipelines over het hoofd zien. Maar ze offeren interpreteerbaarheid op: als er iets misgaat, is debuggen lastiger omdat er geen duidelijke scheiding is tussen waarnemings-, voorspellings- en planningsfouten.
Veelgestelde vragen
Hoe gebruiken autonome voertuigen machine learning om voetgangers te detecteren?
Autonome voertuigen maken gebruik van convolutionele neurale netwerken, getraind op miljoenen gelabelde afbeeldingen, om voetgangers in camerabeelden te detecteren. Deze modellen identificeren menselijke vormen, houdingen en bewegingspatronen, zelfs onder uitdagende omstandigheden zoals slechte verlichting of gedeeltelijke obstructie. Sensorfusie combineert cameragegevens met LiDAR- en radarinput om detecties te bevestigen en de positie van voetgangers nauwkeurig te schatten. Het systeem volgt continu gedetecteerde voetgangers en voorspelt hun waarschijnlijke routes om botsingen te voorkomen.
Wat is het verschil tussen autonoom rijden van niveau 2 en niveau 4?
Systemen van niveau 2 bieden rijhulpfuncties zoals adaptieve cruisecontrol en rijstrookassistentie, maar mensen blijven verantwoordelijk voor het monitoren van de omgeving en moeten direct klaarstaan om de controle over te nemen. Systemen van niveau 4 voeren alle rijtaken uit binnen specifieke omstandigheden – zoals afgebakende stedelijke gebieden of snelwegen – zonder menselijke tussenkomst, hoewel ze wel om overdracht kunnen vragen wanneer ze hun operationele grenzen naderen. De eisen aan machine learning verschillen aanzienlijk: systemen van niveau 4 hebben veel robuustere waarnemings-, voorspellings- en planningsmogelijkheden nodig om veilig te kunnen functioneren zonder menselijke ondersteuning.
Hoeveel tests zijn er nodig voordat zelfrijdende voertuigen veilig kunnen functioneren?
Volgens branchebenchmarks zijn verificatie en testen (inclusief MCDC) doorgaans goed voor 501 tot 701 biljoen dollar aan totale ontwikkelingskosten voor veiligheidskritische software. Voor autonome voertuigen vereist uitgebreid testen miljoenen kilometers aan daadwerkelijk rijden, plus miljarden kilometers aan gesimuleerde scenario's die extreme situaties dekken. Europese regelgeving vereist dat fabrikanten veilig gedrag aantonen vóór de implementatie, in plaats van zelfcertificering toe te staan. Nieuwe combinatorische testmethoden van NIST genereren 781 biljoen dollar aan meer verschillende kritische testscenario's dan de standaardmethoden, waardoor grondige validatie beter haalbaar is.
Kunnen zelfrijdende voertuigen slechte weersomstandigheden aan?
Het weer blijft een van de grootste uitdagingen voor machine learning-systemen voor autonome voertuigen. Zware regen, sneeuw en mist verminderen de prestaties van sensoren: camera's verliezen zicht, LiDAR-signalen verstrooien door neerslag en wegmarkeringen verdwijnen onder een sneeuwdek. De huidige systemen presteren het best bij helder weer en vereisen mogelijk menselijke tussenkomst of beperken hun operationele mogelijkheden in extreme omstandigheden. Onderzoekers ontwikkelen weerbestendige modellen die getraind zijn op diverse klimaatgegevens en onderzoeken sensorfusiestrategieën die de relatieve sterke punten van elke sensor onder verschillende omstandigheden benutten.
Hoe leren autonome voertuigen van ervaringen?
Onderzoekers van Cornell hebben systemen ontwikkeld waarmee autonome voertuigen een 'geheugen' van eerdere ritten kunnen creëren en dit kunnen gebruiken voor toekomstige navigatie. Voertuigen slaan informatie op over lastige kruispunten, verkeerspatronen op verschillende tijdstippen van de dag en succesvolle strategieën voor bekende routes. Deze systemen, die gebruikmaken van geheugen, verbeteren de prestaties door ervaring op te doen, terwijl ze tegelijkertijd in staat blijven om met nieuwe omgevingen om te gaan. Machine learning-modellen worden continu bijgewerkt naarmate voertuigen meer gegevens verzamelen, maar de updates worden grondig getest voordat ze worden ingezet om ervoor te zorgen dat verbeteringen geen nieuwe risico's met zich meebrengen.
Wat weerhoudt hackers ervan om AI-systemen in autonome voertuigen te misleiden?
Onderzoek naar verklaarbaar machinaal leren voor veilige slimme voertuigen identificeert verschillende verdedigingsmechanismen tegen aanvallen van buitenaf. Redundante sensormodaliteiten maken aanvallen moeilijker – het tegelijkertijd misleiden van zowel camera's als LiDAR vereist complexere exploits. Anomaliedetectiesystemen signaleren ongebruikelijke patronen die kunnen wijzen op aanvallen of sensorstoringen. Versleutelde V2X-communicatie voorkomt berichtvervalsing. Beveiligingsstrategieën in meerdere lagen zorgen ervoor dat, zelfs als één systeem wordt gecompromitteerd, veiligheidskritieke functies over back-upbescherming beschikken. Het beveiligen van complexe neurale netwerken tegen alle mogelijke aanvallen blijft echter een actuele onderzoeksuitdaging.
Wanneer zullen volledig autonome voertuigen op grote schaal beschikbaar zijn?
De tijdlijn voor volledige autonomie op niveau 5 – voertuigen die alle scenario's onder alle omstandigheden aankunnen – blijft onzeker. De huidige implementaties richten zich op systemen op niveau 4 die opereren in afgebakende gebieden met gunstige omstandigheden. De overgang van een betrouwbaarheid van 99% naar de 99,999% of betere betrouwbaarheid die nodig is voor onbegeleide werking in alle omgevingen, blijkt moeilijker dan aanvankelijk werd voorspeld. Analyses uit de sector wijzen erop dat de beperkte implementaties van niveau 4 geleidelijk zullen uitbreiden tot 2030, waarbij bredere acceptatie afhankelijk is van het oplossen van de resterende technische uitdagingen met betrekking tot uitzonderlijke gevallen, weerbestendigheid en wettelijke goedkeuring.
De weg vooruit
Machine learning heeft autonome voertuigen getransformeerd van een verre droom tot een zich ontwikkelende realiteit. Neurale netwerken maken waarnemingssystemen mogelijk die het menselijk zicht evenaren, voorspellingsmodellen die het gedrag van bestuurders voorspellen en planningsalgoritmen die door complex verkeer navigeren.
Maar er blijven aanzienlijke uitdagingen bestaan. Zelfs de meest geavanceerde systemen worden nog steeds geconfronteerd met uitzonderlijke gevallen. Weersomstandigheden hebben een negatieve invloed op de prestaties van sensoren. Regelgeving kan de technologische ontwikkelingen maar moeilijk bijbenen. En de betrouwbaarheidsnorm van 99,999% die nodig is voor het publieke vertrouwen, vereist het oplossen van problemen die zich aan de grenzen van de huidige machine learning-mogelijkheden bevinden.
De weg vooruit combineert technische innovatie met rigoureuze validatie. Transformer-architecturen en aandachtmechanismen beloven een beter begrip van de omgeving. Federated learning maakt privacyvriendelijke verbetering mogelijk op basis van collectieve ervaring. Veilig reinforcement learning met menselijke feedback creëert systemen die leren met respect voor veiligheidsgrenzen.
Testnormen van NIST, veiligheidsrichtlijnen van IEEE en wettelijke vereisten in Europa en elders zorgen ervoor dat autonome voertuigen aan strenge veiligheidseisen voldoen voordat ze op grote schaal worden ingezet. Deze waarborgen vertragen de ontwikkeling wellicht, maar ze zijn essentieel voor het bouwen van systemen die mensen kunnen vertrouwen.
De wereldwijde markt voor autonome voertuigen had in 2020 een waarde van ongeveer 150-80 miljard dollar (afhankelijk van de omvang van de Level 3+-systemen) en is aanzienlijk sneller gegroeid dan aanvankelijk werd voorspeld. Tegen 2025 zal de markt naar schatting 200-300 miljard dollar bedragen en in 2026 wordt deze geschat op 250-400 miljard dollar of meer, waarbij veel analisten een aanhoudende sterke groei met dubbele cijfers verwachten (30-351 biljoen dollar of meer in optimistische scenario's).
De technologie voor autonome voertuigen ontwikkelt zich, de inzet ervan neemt toe en de mogelijkheden van machinaal leren blijven verbeteren.
Voor ingenieurs die in dit vakgebied werken, zijn de uitdagingen enorm, maar de potentiële impact is transformatief. Autonome voertuigen zouden het aantal verkeersdoden kunnen verminderen, de mobiliteit kunnen verbeteren voor mensen die niet kunnen autorijden en het stedelijk vervoer fundamenteel kunnen veranderen.
De machine learning-systemen die deze transformatie mogelijk maken, moeten robuust, veilig en betrouwbaar zijn. Dat vereist niet alleen algoritmische innovatie, maar ook rigoureuze engineeringprocessen, uitgebreide tests en regelgeving die de openbare veiligheid vooropstelt.
De toekomst van autonoom rijden wordt vandaag de dag vormgegeven: neuraal netwerk voor neuraal netwerk, testscenario voor testscenario en veiligheidsvalidatie voor veiligheidsvalidatie.